Machine learning 就是一個 deterministic 和 probabilistic 擺盪和交織的過程。
(Input) dataset 一般是 deterministic.
傳統的 machine learning technique, e.g. linear regression, SVM, decision tree, etc. 也很多是 deterministic math.
但是 ML 背後的 modeling, 邏輯,和解釋卻可以用 probabilistic 統一解釋。例如 logistic regression, 甚至 neural network 的分類網路卻可以有 probability 的詮釋。
最後一類從頭到尾都是 probabilistic. 例如 bayesian inference, variational autoencoder.
假設我們都先限制在 training; all data; mini-batch (some randomness) or 1-point. Inference 都可以假設是 1-point.
| Input | Model | Output | Comment | |
|---|---|---|---|---|
| Linear regression | (D) all data | (D) linear function | (D) error | |
| Logistic regression | (D) all data | (D) logistic function | (P) probability distribution | distribution is a (D) function |
| Classification NN learning | (P) random minibatch data | (D) NN | (P) random gradient | Loss + SGD |
| Classification NN inference | (D) fixed 1-data | (D) NN | (P) probability distribution | |
| VAE training | (P) fixed 1-data | (D) NN | (P) random gradient | Loss + SGD |
| VAE encoder, training | (D) fixed 1-data | (D) NN | (P) parameter of distribution | parameter to RV |
| VAE decoder, generation | (P) random 1-sample from z | (D) NN | (P) random output variable | output sample |
| SVM | (D) dataset | (D) kernel function | (D) binary |
Some misc note
absolute deterministic: function, NN? (input/output), not parameter deterministic/probabilistic: random variable, distribution; ideal is random, but representation (function) is determinstic! probabilistic: sampling, MC
single data-point and collective data
我們分析什麼 input-model-output pattern 是合理的?
- D-D-D or P-P-P 顯然合理 (everything is deterministic or probabilistic)
- P-D-P or D-P-P 也合理 (probabilistic input or model 產生 probabilistic output)
- D-D-P 看起來奇怪需要解釋 (determinsitic input and model 產生 probabilistic output)
- D-P-D or P-P-D or P-D-D 似乎不 make sense (probabilistic input or model 產生 deterministic output)
Deterministic inside Probabilistic (D-D-P)
只看上表又太簡化。例如 input (D), model (D), 如何產生 output (P)?
我們更進一步分析 probabilistic: 包含 distribution 和 sampling.
- Distribution (function) 和 parameters 可以視為另一類 deterministic! 因為 distribution function 本身並非 random.
- 真正的 probabilistic 顯現在 randomness, 例如 Sampling 是 random, 也就是每次可能不同。
(D) Distribution and (P or Random) Sample 分布和採樣
以上的分析都是基於數學上的機率分布或是訊息論。實務上我們看不到摸不到機率分布或是 entropy/information,只有採樣 (sample) 和 Monte Carlo simulation.
我們先從機率分布 $p(x)$, $x$ 的期望值定義為: \(\mathbb{E}[x]=\int x p(x) d x\) 如果我們選擇 $x_o < x_1 < … < x_n$,數值積分變成 \(\mathbb{E}[x] \approx \sum_{i=1}^{n} x_{i} p\left(x_{i}\right)\left(x_{i}-x_{i-1}\right)\)
問題是我們可能根本不知道 $p(x_i)$,這就是有趣的部分:$p(x_i)(x_i - x_{i-1})$ 代表 $x_i$ 採樣出現的機率。也就是說其實我們不用做什麼事,只要“隨機採樣” $x_i$,就自帶機率部分。但是我們需要 normalize to total 採樣次數。 \(\mathbb{E}[x] \approx \frac{1}{n} \sum_{i=1}^{n} x_{i}, \quad x_{i} \sim p(x)\)
- 注意採樣的 $x_i$ 只要求隨機,並不要求有順序 $x_o < x_1 < … < x_n$.
- $p(x_i)$ 大的採樣機率自然大。採樣結果已經包含了 $p(x)$ 就不用再乘 $p(x)$, 也不用知道 $p(x)$ 到底是什麼。
- 可以推廣到一般的期望值 \(\mathbb{E}_{x \sim p(x)}[f(x)]=\int f(x) p(x) d x \approx \frac{1}{n} \sum_{i=1}^{n} f\left(x_{i}\right), \quad x_{i} \sim p(x)\)
這就是蒙地卡羅模擬的基礎。看起來簡單,實際上隨機採樣並不容易。 Gaussian distribution,uniform distribution 採樣很容易。但是一個複雜的 distribution 像是 image distribution 的採樣很困難。
Example 1: VAE Training
VAE loss function, 這是一個 expectation base on (D) distribution. 我們要 throw in (R) samples 才能 train encoder and decoder NN, i.e. $\theta, \phi$
\[\begin{aligned} \mathcal{L} &=\mathbb{E}_{x \sim \tilde{p}(x)}\left[\mathbb{E}_{z \sim p(z \mid x)}[-\ln q(x \mid z)]+\mathbb{E}_{z \sim p(z \mid x)}\left[\ln \frac{p(z \mid x)}{q(z)}\right]\right] \\ &=\mathbb{E}_{x \sim \tilde{p}(x)}\left[\mathbb{E}_{z \sim p(z \mid x)}[-\ln q(x \mid z)]+K L(p(z \mid x) \| q(z))\right] \end{aligned}\]Imagenet 的影像 sample 就不是隨機 sample, 有太多人為的選擇。 我們假設 for a fixed image $x_i$
\[l_{i}(\theta, \phi)=-E_{z \sim q_{\phi}\left(z | x_{i}\right)}\left[\log p_{\theta}(x_{i} | z)\right]+K L\left(q_{\phi}(z | x_{i}) \|\,p(z)\right)\]因為 $p(z)$ and $p_\theta(x’_i\mid z)$ 是由 Gaussian random variable 產生。基本符合“採樣”原則。$z$ 的 mean and variance 是從 $x_i$ 得到,一般不怎麼 random? 但是 training 大多使用 stochastic gradient descend (SGD), 算是比較 random? but the prior image set 依然不是 random, 也不一定是 $p(x)$ distribution. 我們假設 $x_i$ sample somehow follows $p(x)$ to make our life easier :)
\[\mathcal{L}=\mathbb{E}_{x \sim \tilde{p}(x)}[-\ln q(x \mid z)+K L(p(z \mid x) \| q(z))], \quad z \sim p(z \mid x)\]$x_i$ 得到 mean and variance. 第一個對 posterior expectation 可以用採樣取代。 KL 則可以用 close form!! which is $\mu^2 + \log \sigma$ (TBC)
因此可以採樣加上計算得到單一 $x_i$. 這就是 VAE 的 training 方式?
我們再看一些其他 training 例子。
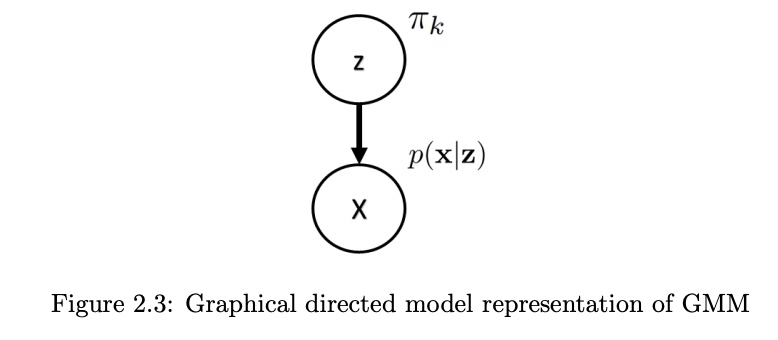
Fitting Latent Variable Models EM Algorithm
Expectation Maximization (EM) algorithm is widely used algorithm for fitting directed LVM models which aim is the same as in the case of maximum likelihood estimation - maximize data likelihood $p_{\theta}(x)$ for some model $p_{\theta}(x, z)$ of particular parametric family with parameters θ.
Having collected observable data points $\mathcal{D}={\mathbf{x}^{(1)}, \mathbf{x}^{(2)}, \cdots, \mathbf{x}^{(m)}}$ (where $m \ge 1$), we wish to maximize marginal log-likelihood of the data
\[\log \left[p_{\boldsymbol{\theta}}(\mathcal{D})\right]=\mathbb{E}_{\mathbf{x} \sim \mathcal{D}}\left[\log p_{\boldsymbol{\theta}}(\mathbf{x})\right]=\mathbb{E}_{\mathbf{x} \sim \mathcal{D}}\left[\mathbb{E}_{\mathbf{z} \sim p_{\boldsymbol{\theta}}(\mathbf{z} \mid \mathbf{x})}\left[\log p_{\boldsymbol{\theta}}(\mathbf{x}, \mathbf{z})\right]\right]\][@poczosCllusteringEM2015]
Example 2: Given Input 經過 Deterministic NN 轉成 Probabilistic Conditional Distribution
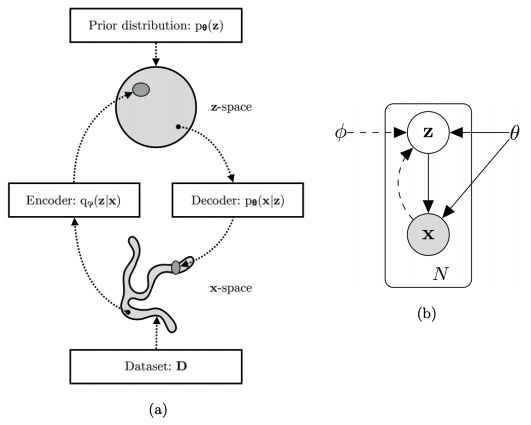
[@kingmaIntroductionVariational2019]
一般的 differentiable feed-forward neural networks are a particularly flexible and computationally scalable type of function approximator.
A particularly interesting application is probabilistic models, i.e. the use of neural networks for probability density functions (PDFs) or probability mass functions (PMFs) in probabilistic models (how?). Probabilistic models based on neural networks are computationally scalable since they allow for stochastic gradient-based optimization.
We will denote a deep NN as a vector function: NeuraNet(.). In case of neural entwork based image classifcation, for example, nerual networks parameterize a categorical distrbution $p_{\theta}(y\mid \mathbf{x})$ over a class label $y$, conditioned on an image $\mathbf{x}$. ??? y is a single label or distribution?
\[\begin{aligned} \mathbf{p} &=\operatorname{NeuralNet}_{\boldsymbol{\theta}}(\mathbf{x}) \\ p_{\boldsymbol{\theta}}(y \mid \mathbf{x}) &=\text { Categorical }(y ; \mathbf{p}) \end{aligned}\]where the last operation of NeuralNet(.) is typical a softmax() function! such that $\Sigma_i p_i = 1$
這是很有趣的觀點。 $\mathbf{x}$ and $\mathbf{p}$ 都是 deterministic, 甚至 softmax function 都是 deterministic. 但我們賦予最後的 $y$ probabilistic distribution 涵義!基本上 NN 分類網路都是如此 (e.g. VGG, ResNet, MobileNet)。
例如 $\mathbf{x}$ 可能是一張狗照片, $\mathbf{p}$ 是 feature extraction of $\mathbf{x}$. 兩者都是 deterministic. 但最後 categorical function 直接把 $\mathbf{p}$ 賦予多值的 (deterministic) distribution, 例如狗的機率 $p_1 = 0.8,$ 貓的機率 $p_2 = 0.15,$ 其他的機率 $p_3 = 0.05.$ 這和我們一般想像的機率性 outcome, 同一個 $\mathbf{p}$ 有時 output 狗,有時 output 貓不同。
數學上這只是 vector to vector conversion, $\mathbf{p}$ 是 high dimension feature vector (e.g. 1024x1), $\mathbf{y} = [y_1, y_2, \cdots]$ 是 low dimension output vector (e.g. 3x1 or 10x1) summing to 1. 重點是這個 low dimension vector $\mathbf{y}$ 就是 conditional distribution! 也就是一個 sample $\mathbf{x}$ 就可以 output 一個 conditional distribution, 而不需要很多 $\mathbf{x}$ samples 產生 conditional distribution! 這很像量子力學中一個電子就可以產生 wave distribution, 有點違反直覺。
這似乎是把一個 random sample 轉換成一個 (deterministic) conditional distribution 的方式。不過是否是 general method, TBC.
Example 3: Multivariate Bernoulli data (3 產生 conditional distribution 的方法和 2 一樣)
一個簡單的例子說明 hand-waving 的 assertion for the DLVM.
Prior $p(z)$ 是簡單的 normal distribution. Neural network 把 random sample $z$ 轉換成 $\mathbf{p}$, 再來 $\mathbf{p}$ 直接變成 Bernoulli distribution! 就像例三的 softmax 一樣。
Likelihood $\log p(x\mid z)$ 因此也是簡單的 cross-entropy, i.e. maximum likelihood ~ minimum cross-entropy loss
\[\begin{aligned} p(\mathbf{z}) &=\mathcal{N}(\mathbf{z} ; 0, \mathbf{I}) \\ \mathbf{p} &=\text { DecoderNeuralNet }_{\boldsymbol{\theta}}(\mathbf{z}) \\ \log p(\mathbf{x} \mid \mathbf{z}) &=\sum_{j=1}^{D} \log p\left(x_{j} \mid \mathbf{z}\right)=\sum_{j=1}^{D} \log \operatorname{Bernoulli}\left(x_{j} ; p_{j}\right) \\ &=\sum_{j=1}^{D} x_{j} \log p_{j}+\left(1-x_{j}\right) \log \left(1-p_{j}\right) \end{aligned}\]where $\forall p_j \in \mathbf{p}: 0 \le p_j \le 1$
Joint distribution $p_{\boldsymbol{\theta}}(\mathbf{x}, \mathbf{z})=p_{\boldsymbol{\theta}}(\mathbf{z}) p_{\boldsymbol{\theta}}(\mathbf{x} \mid \mathbf{z})$ 就是把兩者乘積。雖然看起來 messy, 還夾著 neural network, 但理論上 straightforward, 甚至可以寫出 analytical form.
但反過來: posterior $p(z\mid x)$, marginal likelihood $p(x)$ 即使在這麼簡單的 network, 都是難啃的骨頭!
Example 4:Given Input 經過 Deterministic NN 轉成 Parameters of A Random Variable to Create Conditional Distribution (e.g. VAE encoder)
Example 2 and 3 NN 產生 conditional distribution 的方式只能用在 discrete distribution. 對於 continuous distribution, NN 無法產生無限長的 distribution! 例如 VAE 使用 Normal distribution 如下:
\[\begin{aligned} (\boldsymbol{\mu}, \log \boldsymbol{\sigma}) &=\text { EncoderNeuralNet }_{\boldsymbol{\phi}}(\mathbf{x}) \\ q_{\boldsymbol{\phi}}(\mathbf{z} \mid \mathbf{x}) &=\mathcal{N}(\mathbf{z} ; \boldsymbol{\mu}, \operatorname{diag}(\boldsymbol{\sigma})) \end{aligned}\]Neural network 產生 $\mu, \log \sigma$ for normal distribution. 雖然這解決 deterministic to probabilistic 問題。但聽起來還是有點魔幻寫實方式把 deterministic to probabilistic. 這是 VAE 的實際做法。
雖然的確產生 conditional distribtuion, 但似乎比直接產生 distribution 更不直觀!例如為什麼是 $\log \sigma$, 不是 $\sigma$ 或 $1/\sigma$ ? 另外只產生 $\mu, \log \sigma$ 兩個 parameters, 是否太簡化? 比起 softmax distribution 可能包含 10-100 parameters.
Before we can answer this question, let me quote below and move on to algorithm.
Typically, we use a single encoder neural network to perform posterior inference over all of the datapoints in our dataset. This can be contrasted to more traditional variational inference methods where the variational parameters are not shared, but instead separately and iteratively optimized per datapoint. The strategy used in VAEs of sharing variational parameters across datapoints is also called amortized variational inference (Gershman and Goodman, 2014). With amortized inference we can avoid a per-datapoint optimization loop, and leverage the efficiency of SGD.
Example 5: Decoder: How to explain $p(x\mid z)$ 的 conditional distribution?
https://towardsdatascience.com/understanding-variational-autoencoders-vaes-f70510919f73
Let’s now make the assumption that p(z) is a standard Gaussian distribution and that $p(x\mid z)$ is a Gaussian distribution whose mean is defined by a deterministic function f of the variable of z and whose covariance matrix has the form of a positive constant c that multiplies the identity matrix I. The function f is assumed to belong to a family of functions denoted F that is left unspecified for the moment and that will be chosen later. Thus, we have (不是很 make sense!)
\[\begin{aligned}(\boldsymbol{f(z)}) &=\text { DecoderNeuralNet }_{\boldsymbol{\theta}}(\mathbf{z}) \\p_{\boldsymbol{\theta}}(\mathbf{x} \mid \mathbf{z}) &=\mathcal{N}(\mathbf{x} ; \boldsymbol{f(z)}, c)\end{aligned}\] \[\begin{aligned} &p(z) \equiv \mathcal{N}(0, I) \\ &p(x \mid z) \equiv \mathcal{N}(f(z), c I) \quad f \in F \quad c>0 \end{aligned}\]What is $c$? 似乎只能 heuristically 解釋,沒有很 solid math fondation.
一個 random generator 不夠解釋 encoder and decoder? 那就兩個
我再想了一下,其實這可以視為 $z$ 的定義問題。我們借用 reparameterization trick 的 encoder formulation for $z$ 如下:
\[\begin{aligned}\boldsymbol{\epsilon} & \sim \mathcal{N}(0, \mathbf{I}) \\(\boldsymbol{\mu}, \log \boldsymbol{\sigma}) &=\text { EncoderNeuralNet }_{\phi}(\mathbf{x}) \\\mathbf{z} &=\boldsymbol{\mu}+\boldsymbol{\sigma} \odot \boldsymbol{\epsilon}\end{aligned}\]我們可以分解 $\boldsymbol{\epsilon} = \boldsymbol{\epsilon}_1 + \boldsymbol{\epsilon}_2$ 都是 random variables.
\[\begin{aligned} \boldsymbol{\epsilon_1}, \boldsymbol{\epsilon_2} & \sim \mathcal{N}(0, \mathbf{I}/\sqrt{2}) \\ (\boldsymbol{\mu}, \log \boldsymbol{\sigma}) &=\text { EncoderNeuralNet }_{\phi}(\mathbf{x}) \\ \mathbf{z}' &=\boldsymbol{\mu}+\boldsymbol{\sigma} \odot \boldsymbol{\epsilon_1} \\ \boldsymbol{f(z')} &=\text { DecoderNeuralNet }_{\boldsymbol{\theta}}(\mathbf{z'}) \\ \mathbf{x}' = \boldsymbol{f(z')}+\boldsymbol{\delta} &=\text { DecoderNeuralNet }_{\boldsymbol{\theta}}(\mathbf{z}'+\boldsymbol{\sigma} \odot \boldsymbol{\epsilon}_2) \\ p_{\boldsymbol{\theta}}(\mathbf{x}' \mid \mathbf{z}') &=\mathcal{N}(\mathbf{x}' ; \boldsymbol{f(z')}, c) \end{aligned}\]where $c$ is the standard deviation of $\boldsymbol{\delta}$. 用 $z$’ 取代 $z$.
VAE Example
p(x): prior
p(z|x): likelihood
p(x|z): posterior
還是應該反過來?
$p(z)$: prior $p(x|z)$: likelihood, decoder $p(z|x)$: posterior, encoder
$I(X; Z) = H(X) - H(X\mid Z) \ge H(X) - R(X\mid Z)$ where $R(X\mid Z)$ denotes the expected reconstruction error of $X$ given the codes $Y$.
\[\begin{aligned} I(X; Z) &= D_{KL} (p_{(X,Z)} \| p_X p_Z) = E_X [D_{KL} (p_{(Z\mid X)} \| p_Z)] = H(X) - H(X\mid Z) \\ &= H(X) + \iint p(x, z) \log p(x\mid z) d x d z \\ &= H(X) + \int p(x) \left[ \int q(z \mid x) \log p(x\mid z) d z \right] d x \\ &= H(X) + \mathbb{E}_{x \sim p(x)}\left[\mathbb{E}_{z \sim q_{\phi}(z | x)}[\log p_{\theta}(x | z)]\right] \\ & \ge H(X) + \mathbb{E}_{x \sim \tilde{p}(x)}\left[\mathbb{E}_{z \sim q_{\phi}(z | x)}[\log p_{\theta}(x | z)]\right] \\ E_X [D_{KL} (p_{(Z|X)} \| p_Z)] &= H(X) + \mathbb{E}_{x \sim p(x)}\left[\mathbb{E}_{z \sim q_{\phi}(z | x)}[\log p_{\theta}(x | z)]\right] \end{aligned}\]or
\[\begin{aligned} H(X) = E_X [D_{KL} (p_{(Z|X)} \| p_Z)] - \mathbb{E}_{x \sim p(x)}\left[\mathbb{E}_{z \sim q_{\phi}(z | x)}[\log p_{\theta}(x | z)]\right] \end{aligned}\]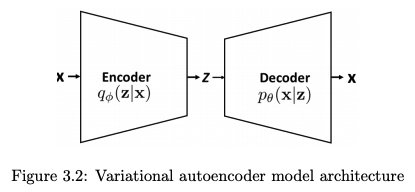
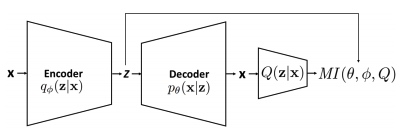
Variational Mutual Information
From $I(z; x) = H(z) - H(z\mid x)$
\[\begin{aligned} I(\mathbf{z} ; \mathbf{x})=& H(\mathbf{z})-H(\mathbf{z} \mid \mathbf{x}) \\ =& \mathbb{E}_{\mathbf{x} \sim p_{\theta}(\mathbf{x} \mid \mathbf{z})}\left[\mathbb{E}_{\mathbf{z} \sim q_{\phi}(\mathbf{z} \mid \mathbf{x})}[\log P(\mathbf{z} \mid \mathbf{x})]\right]+H(\mathbf{z}) \\ =& \mathbb{E}_{\mathbf{x} \sim p_{\theta}(\mathbf{x} \mid \mathbf{z})}\left[D_{K L}(P(\cdot \mid x) \| Q(\cdot \mid x))\right.\\ &\left.+\mathbb{E}_{\mathbf{z}^{\prime} \sim q_{\phi}(\mathbf{z} \mid \mathbf{x})}\left[\log Q\left(\mathbf{z}^{\prime} \mid \mathbf{x}\right)\right]\right]+H(\mathbf{z}) \\ \geq & \mathbb{E}_{\mathbf{x} \sim p_{\theta}(\mathbf{x} \mid \mathbf{z})}\left[\mathbb{E}_{\mathbf{z}^{\prime} \sim q_{\phi}(\mathbf{z} \mid \mathbf{x})}\left[\log Q\left(\mathbf{z}^{\prime} \mid \mathbf{x}\right)\right]\right]+H(\mathbf{z}) \end{aligned}\]where $Q$ is auxiliary distribution.
Graph Representation and EM Algorithm
這是 GNN 最簡單的例子。