title: Math-AI: Least Square Optimization date: 2022-04-30 09:28:08 categories:
- AI tags: [Optimization, Least square, BA, SLAM] description: Feature Extraction typora-root-url: ../../allenlu2009.github.io —
Reference
[@talakIntroductionNonLinear2020]
Least Square Summary (可以先跳過)
結論如下。簡單來説:
- 如果是 linear least square (one term or sum), 只要用一個大矩陣,使用 Cholesky or QR factorization 求解。
- 如果是 nonlinear least square, 可以用一個大矩陣,找出 gradient (1st order) 或是 Hessian (2nd order) 求解。
- 基本很少用 gradient descent, 一般是 Gauss-Newton, Levenberg-Marquardt, Powell’s dogleg.
- Nonlinear 都會被 linearized, GN/LM 都會 call linear least square solver 例如 Cholesky, QR, etc.
- 如果是 nonlinear least square sum, 有特別的算法如 Ceres or G2O, 可以更 efficiency 求解。
- 其實 G2O solver 也是 call 以上的方法。只是用 graph 作爲 front-end interface.
| One big linear least square | sum of many linear least square’s | One big nonlinear least square | Sum of many nonlinear least square’s | |||
|---|---|---|---|---|---|---|
| Form | $\underset{x \in \mathbb{R}^{n}}{\min}|A x-b|^{2}$ | $\min {x} \sum{i}\left|y_{i}-A_{i} x\right|^{2}$ | $\min|r(x)|^{2}=\sum_{i}\left | r_{i}(x)\right | ^{2}$ | $\min {\mathbf{x}} \sum{i} \rho_{i}\left(\left|f_{i}\left(x_{i_{1}}, \ldots, x_{i_{k}}\right)\right|^{2}\right)$ |
| Solver | (1) Cholesky , or (2) QR | 結合成一個 matrix, 變成左式 | (1) Gradient descent; or (2) Gauss-Newton | (1) Ceres, or (2) G2O | ||
| Convex | Yes | Yes | No guarantee | No guarantee | ||
| Application | linear fitting | linear fitting | Bundle adjustment, planet trajectory |
Introduction
幾乎所有優化問題其本質都可以追溯到 least square principle。據說 ceres 的命名是天文學家 Piazzi 閑暇無事的時候觀測一顆沒有觀測到的星星,最後 Gauss 用 least square 算出了這個小行星的軌道,故將這個小行星命名為 ceres,中文翻譯成穀神星。我們一步一步看。
高中程度 (一元二次方程+微積分)
我們先從宇宙最基本的 optimization function,一元二次方程式開始:$y = x^2$ , 或者改寫成 $y = |f(x)|^2$ where $f(x) = x$
\[\arg_x \min \|f(x)\|^2\]最小值當然是 $y$ 的一階導數為 0, i.e. $x=0$; 另外從 $y$ 的二階導數可以看出是 convex,$y’’ = 2 |f’(x) |^2 + 2 f’‘(x) f(x) >0$。
大學程度(統計綫性迴歸)
此時問題的性質改變。給定很多測量或統計 $(x_i, y_i)$, 我們想要找到一條直綫 $f(x) = a x + b$ 使得”誤差最小“,如下圖。
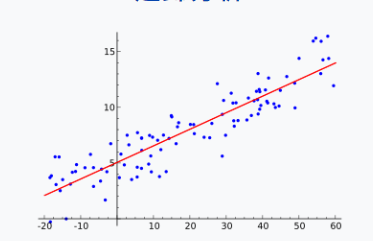 \(\arg_{a,b} \min \sum_i \| y_i - (a x_i + b) \|^2 = \arg_{a,b} \min \sum_i \| e_i \|^2 = S(a, b) \label{lqerr}\)
\(\arg_{a,b} \min \sum_i \| y_i - (a x_i + b) \|^2 = \arg_{a,b} \min \sum_i \| e_i \|^2 = S(a, b) \label{lqerr}\)
where $e_i = y_i - (a x_i + b)$
幾個重點 :
- 此處把函數的極小值變成誤差平方的極小值。一方面是平方函數的極小值非常容易計算和驗證 (一階和二階導數)。再者平方誤差對應 normal distribution 的 maximum (log)-likelihood solution.
- 此處把原來解函數, $y’ = 0$ or $f(x) f’(x) = 0$, 變成 multiple points overfitting + error sum minimization problem. 注意此處 error 是很多 error term 的平方和。 最後還是解 $\frac{\partial S}{\partial a} = \frac{\partial S}{\partial b} = 0$
- 此處是 1D 的 regression, 可以直接推廣到高維 regression $y = f(x_1, x_2, …, x_n)$.
Example 1 (from wiki):
某次實驗得到了四個數據點 (x,y):(1,6), (2,5), (3,7), (4,10)(右圖紅色的點)。我們希望找出一條和這四個點最匹配的直線 $y=\beta_{1} + \beta_{2}x$
 \(\begin{aligned}
&\beta_{1}+1 \beta_{2}=6 \\
&\beta_{1}+2 \beta_{2}=5 \\
&\beta_{1}+3 \beta_{2}=7 \\
&\beta_{1}+4 \beta_{2}=10
\end{aligned}\)
最小平方法採用的方法是盡量使得等號兩邊的平變異數最小, 也就是找出這個函數的最小值:
\(\begin{aligned}
S\left(\beta_{1}, \beta_{2}\right)=& {\left[6-\left(\beta_{1}+1 \beta_{2}\right)\right]^{2}+\left[5-\left(\beta_{1}+2 \beta_{2}\right)\right]^{2} } \\
&+\left[7-\left(\beta_{1}+3 \beta_{2}\right)\right]^{2}+\left[10-\left(\beta_{1}+4 \beta_{2}\right)\right]^{2}
\end{aligned}\)
最小值可以通過對 $S\left(\beta_{1}, \beta_{2}\right)$ 分別求 $\beta_{1}$ 和 $\beta_{2}$ 的偏導數,然後使他們等於零得到。
\(\begin{aligned}
&\frac{\partial S}{\partial \beta_{1}}=0=8 \beta_{1}+20 \beta_{2}-56 \\
&\frac{\partial S}{\partial \beta_{2}}=0=20 \beta_{1}+60 \beta_{2}-154
\end{aligned}\)
如此就得到了一個只有兩個末知數的方程組, 很容易就可以解出:
\(\begin{aligned}
&\beta_{1}=3.5 \\
&\beta_{2}=1.4
\end{aligned}\)
也就是說直線 $y=3.5+1.4 x$ 是最佳的。
\(\begin{aligned}
&\beta_{1}+1 \beta_{2}=6 \\
&\beta_{1}+2 \beta_{2}=5 \\
&\beta_{1}+3 \beta_{2}=7 \\
&\beta_{1}+4 \beta_{2}=10
\end{aligned}\)
最小平方法採用的方法是盡量使得等號兩邊的平變異數最小, 也就是找出這個函數的最小值:
\(\begin{aligned}
S\left(\beta_{1}, \beta_{2}\right)=& {\left[6-\left(\beta_{1}+1 \beta_{2}\right)\right]^{2}+\left[5-\left(\beta_{1}+2 \beta_{2}\right)\right]^{2} } \\
&+\left[7-\left(\beta_{1}+3 \beta_{2}\right)\right]^{2}+\left[10-\left(\beta_{1}+4 \beta_{2}\right)\right]^{2}
\end{aligned}\)
最小值可以通過對 $S\left(\beta_{1}, \beta_{2}\right)$ 分別求 $\beta_{1}$ 和 $\beta_{2}$ 的偏導數,然後使他們等於零得到。
\(\begin{aligned}
&\frac{\partial S}{\partial \beta_{1}}=0=8 \beta_{1}+20 \beta_{2}-56 \\
&\frac{\partial S}{\partial \beta_{2}}=0=20 \beta_{1}+60 \beta_{2}-154
\end{aligned}\)
如此就得到了一個只有兩個末知數的方程組, 很容易就可以解出:
\(\begin{aligned}
&\beta_{1}=3.5 \\
&\beta_{2}=1.4
\end{aligned}\)
也就是說直線 $y=3.5+1.4 x$ 是最佳的。
研究所程度(estimation theory, nonlinear least square optimization, bundle adjustment)
注意這裏的 $x$ and $z_j$ 又和前面的定義不同。沒有注意會非常 confusing!
-
$\mathbf{x}$: 這是我們要找的 (fixed and hidden) parameter 類似 linear regression 的 {a, b} to maximize likelihood 或是 minimize error.
-
$\mathbf{z}_j$: 這是一堆的 measurements including noise, 類似 linear regression 的 $(x_j, y_j)$ pair.
Estimation theory 可以是 linear regression 的推廣。Assume we are given N measurements $\mathbf{z}1, \mathbf{z}_2, …, \mathbf{z}_N$ that are function of a variable to estimate $\mathbf{x}$ (e.g. camera poses, 行星軌道)。 Assume that we are also given the conditional distributions: $\mathbb{P}(\mathbf{z}{j} \mid \boldsymbol{x})$
The maximum likelihood estimator (MLE) is defined as: \(\boldsymbol{x}_{\mathrm{MLE}}=\underset{\boldsymbol{x}}{\arg \max } \,\mathbb{P}\left(\mathbf{z}_{1}, \ldots, \mathbf{z}_{N} \mid \boldsymbol{x}\right) \quad \begin{gathered} \text { Measurement } \\ \text {likelihood } \end{gathered}\) where $\mathbb{P}\left(\boldsymbol{z}{1}, \ldots, \boldsymbol{z}{N} \mid \boldsymbol{x}\right)$ is also called the likelihood of the measurements given $\boldsymbol{x}$. 一般更常用的是 minimize negative log-likelihood: \(x_{\mathrm{MLE}}=\underset{\boldsymbol{x}}{\arg \min }\,\,{-\log \mathbb{P}\left(\mathbf{z}_{1}, \ldots, \mathbf{z}_{N} \mid \boldsymbol{x}\right)} \quad \begin{gathered} \text { Negative } \\ \text {log-likelihood } \label{loglike} \end{gathered}\) 上式如果假設 (i) 所有的 $\mathbf{z}_j = (x_j, y_j)$ 都在一個 linear line/plane/space, i.e. $y_j = a x_j + b + n_j$. 反而 $\refeq{loglike}$ 的 $\mathbf{x} = {a,b}$ 是求解的 hidden parameters, notation 很亂 ; (ii) $n$ 是 additive, zero-mean, normal distribution noise; 就會變成 $\refeq{lqerr}$, linear least square optimization.
當然在比較 general 的情況下,$x$ 和 $y$ 不必是 linear relationship. 可以是 nonlinear relationship,$y = f(x) + n$. 如果還是假設 additive, zero-mean, normal distribution noise, 就是 nonlinear least square optimization.
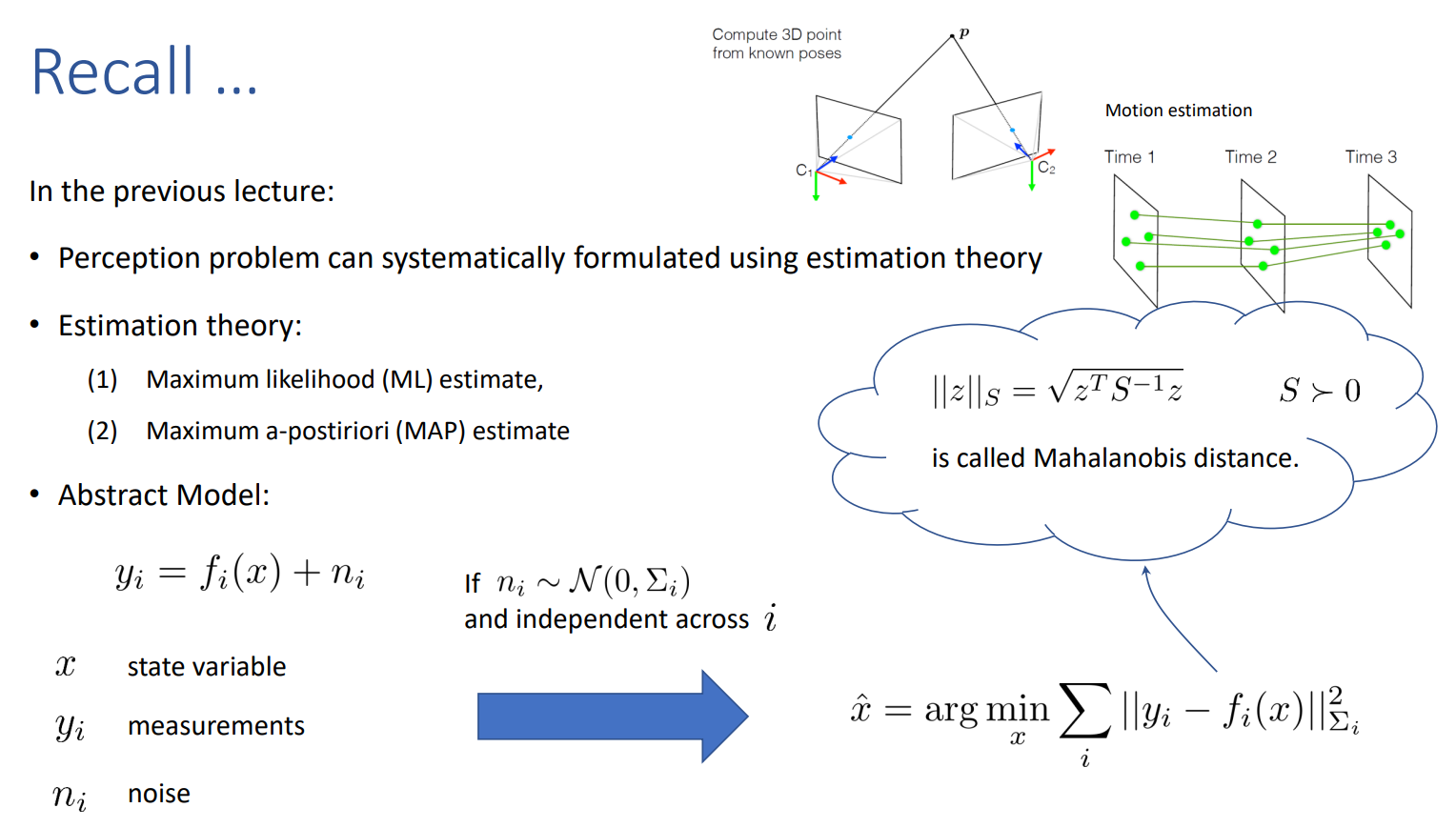
For linear model: \(\hat{x}=\arg \min _{x} \sum_{i}\left\|y_{i}-A_{i} x\right\|_{\Sigma_{i}}^{2}\) 再和 linear regression 對比:
- Measurement with noise 是放在 ${y_i, A_i, \Sigma_i}$. 不是在 ${y_i, x}$ !!!!!
- Hidden parameter 是 $\mathbf{x}$ vector. 如果是 1D linear, $x \sim {a, b}$.
- 另一個小 trick, 就是把 bias b 變成 x 的一部分,稱爲 homogeneous , $A_i$ 只要加上 additional row 1 (見下列).
- 後面我們會再把上式的 summation 結合成一個更大的 matrix,利用 Euclidean distance 特性或是 Mahalanobis distance.
- 下式就是把一堆平方誤差和,變成一個更大的 matrix form。
爲了和之前的平方誤差和形式比較,參考下例:
Example 2 (重複 Example 1, 但用 the new way):
我們把 example 1 用 linear least square 方法重新做一次。其中 n = 2 (2D linear function) and m = 4 (data points)。 \(\begin{aligned} r(x) = A x - b &= {\left[\begin{array}{ll} 1 & 1 \\ 1 & 2 \\ 1 & 3 \\ 1 & 4 \end{array}\right]\left[\begin{array}{l} \beta_{1} \\ \beta_{2} \end{array}\right]-\left[\begin{array}{c} 6 \\ 5 \\ 7 \\ 10 \end{array}\right]} \\ \|r(x)\|^2 &=\|A x-b\|^{2} \end{aligned}\)
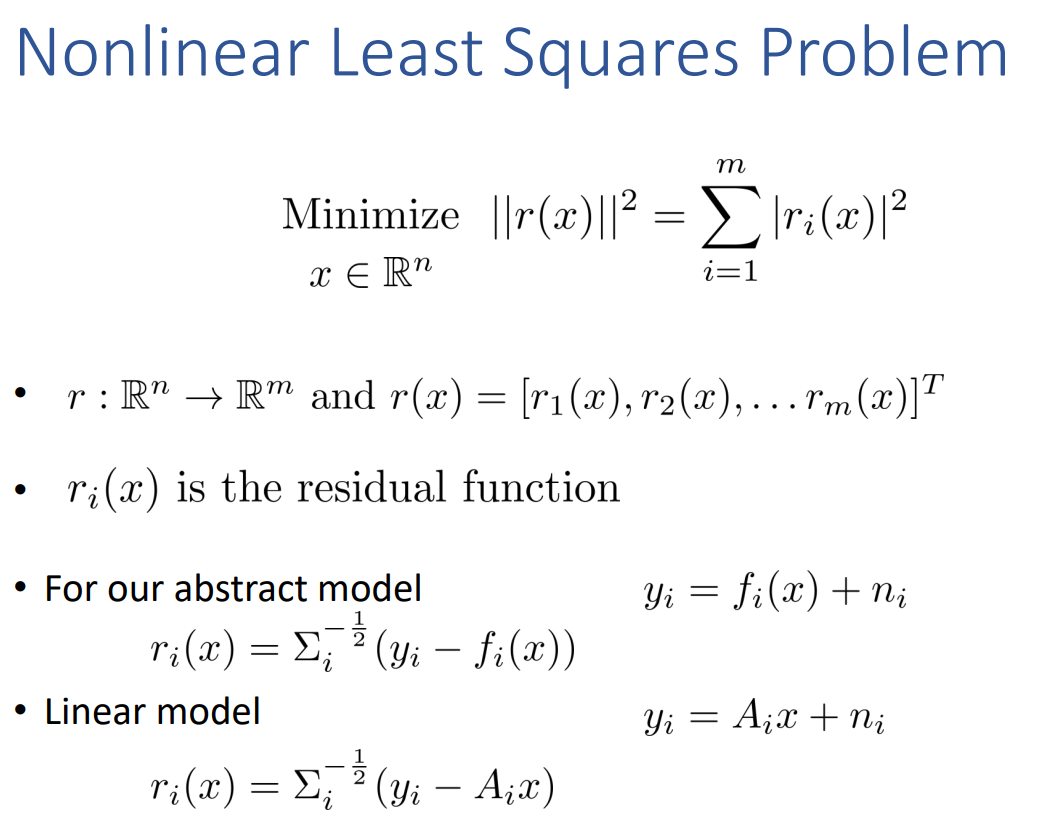
Linear Least Squares Problem
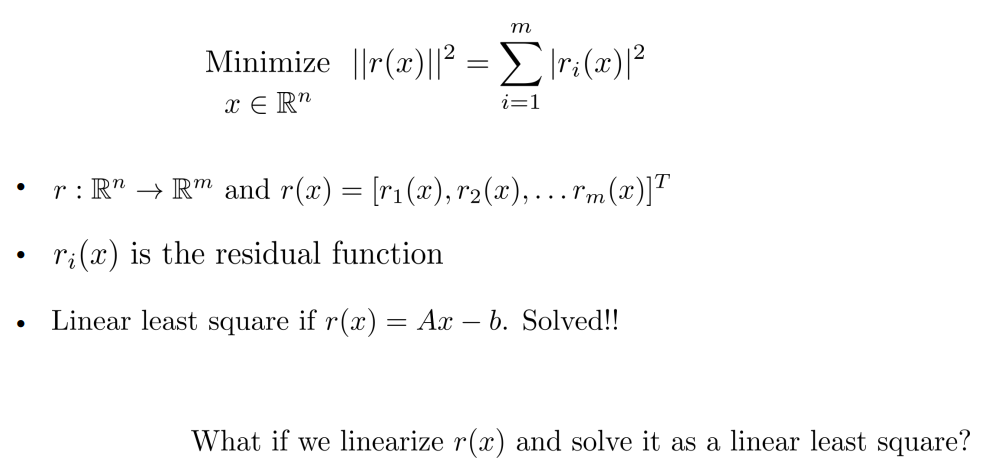
也就是說 \(\underset{x \in \mathbb{R}^{n}}{\operatorname{Minimize}}\|r(x)\|^{2}=\sum_{i=1}^{m}\left|r_{i}(x)\right|^{2}\)
- $r: \mathbb{R}^{n} \rightarrow \mathbb{R}^{m}$ and $r(x)=\left[r_{1}(x), r_{2}(x), \ldots r_{m}(x)\right]^{T}$ n = 2 for 2D linear regression
- $r_{i}(x)$ is the residual function or error function
- if $r(x)=A x-b$ we call it linear least squares problem
注意我們把 summation 拿掉,把 A, b 變成更大的 matrix. \(\underset{x \in \mathbb{R}^{n}}{\operatorname{Minimize}}\|A x-b\|^{2}\)
- $A \in \mathbb{R}^{m \times n}$ and $b \in \mathbb{R}^{m}$
- The objective function is convex! \(\nabla^{2} g(x)=2 A^{T} A \succeq 0\)
- Gradient descent algorithm converges to the global minimum \(x_{t+1}=x_{t}-2 \alpha_{t} A^{T}\left(A x_{t}-b\right)\)
-
But, we can do much better (computationally) by exploiting the problem structure and using the optimality conditions
- Recall: $x$ is a global minima $\Leftrightarrow \nabla g(x)=0$ and $\nabla^{2} g(x) \succeq 0$
- $\nabla g(x)=A^{T} A x-A^{T} b$
- $x$ is a global minima $\Leftrightarrow A^{T} A x=A^{T} b$
How to Solve Linear Least Square Problem?
Method 1: 直接做反矩陣。不是好解法,因爲計算量大 (N^3?),并且 ill-condition 會造成 numerical unstability.
Method 2: Cholesky solver
\[\left(A^{T} A\right) x=A^{T} b\] \[L=\left(\begin{array}{c:cc} \ell_{11} & 0 & 0 \\ \hdashline \ell_{21} & \ell_{22} & 0 \\ \hdashline \ell_{31} & \ell_{32} & \ell_{33} \end{array}\right)\]- Assuming $A^{T} A \succ 0$
- Cholesky decomposition of $A^{T} A$
where $L$ is a lower triangular and thus $L^{T}$ is an upper triangular matrix
\[\left(L L^{T}\right) x=A^{T} b\]兩步解以上方程式:
- Forward substitution: $L y = A^{T} b$
- Backward substitution: $L^T x= y$
Example 2 continue:
\(\begin{aligned} &\mathbf{A}^T \mathbf{A} \mathbf{x} =\mathbf{L} \mathbf{L}^{T} \mathbf{x} = \mathbf{A}^T b \\ &\left(\begin{array}{ll} 4 & 10 \\ 10 & 30 \end{array}\right) \mathbf{x} =\left(\begin{array}{ll} 2 & 0 \\ 5 & \frac{2889}{1292} \end{array}\right) \times\left(\begin{array}{ll} 2 & 5 \\ 0 & \frac{2889}{1292} \end{array}\right) \mathbf{x} =\left(\begin{array}{ll} 28 \\ 77 \end{array}\right) \end{aligned}\) $(y_1, y_2) = (14, \frac{7\times 1292}{2889})$ and $(\beta_1, \beta_2) = (7-\frac{35\times 1292^2}{2\times 2889^2} , \frac{7 \times 1292^2}{2889^2})$ = (3.5, 1.4)
結果和 Example 1 一樣。
Method 2: QR solver
\(\left(A^{T} A\right) x=A^{T} b\)
-
Perform QR factorization of $A^{T} A$ \(A^{T} A=Q R\) where $Q \in \mathbb{R}^{n \times n}$ s.t. $Q^{T} Q=I$ and $R \in \mathbb{R}^{n \times n}$ is upper triangular
- QR is slower than Cholesky
- QR gives better numerical stability than Cholesky
Back to Nonlinear Least Squares Problem
How to Solve Nonlinear Least Square Problem?
Special case n = 1
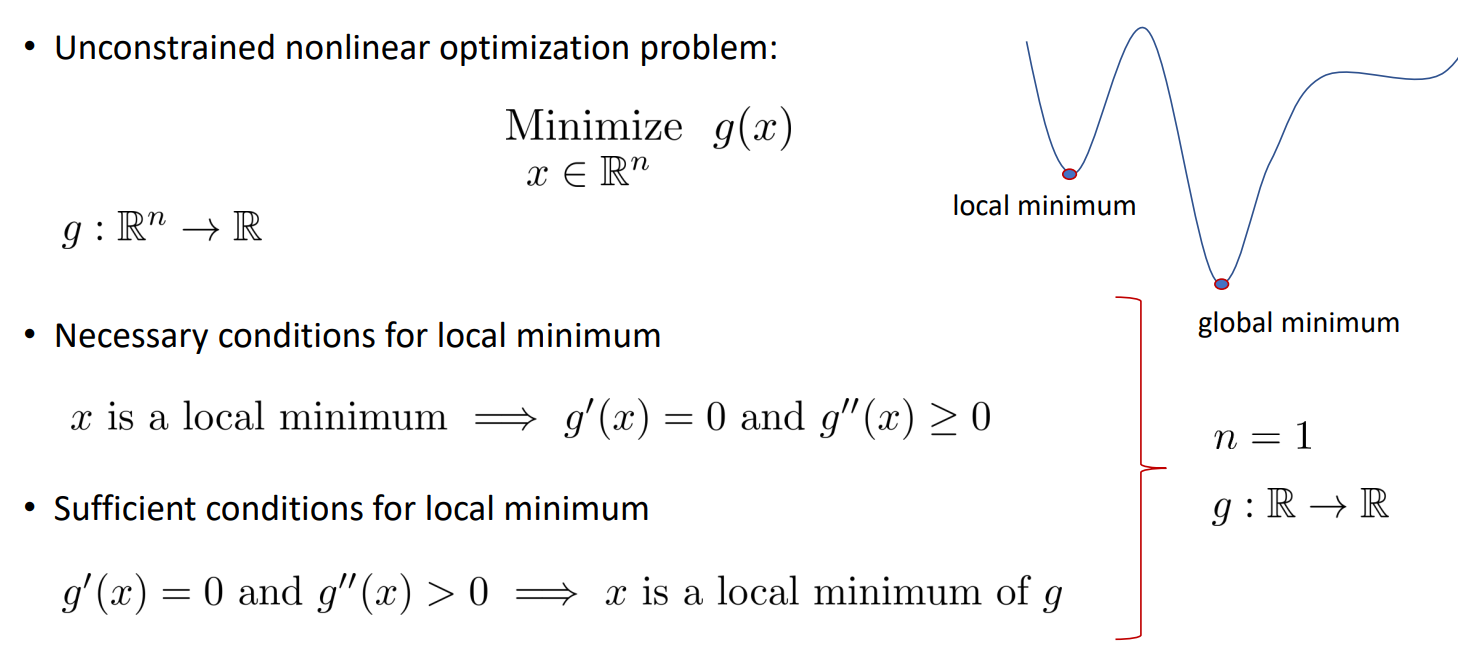
n dimension
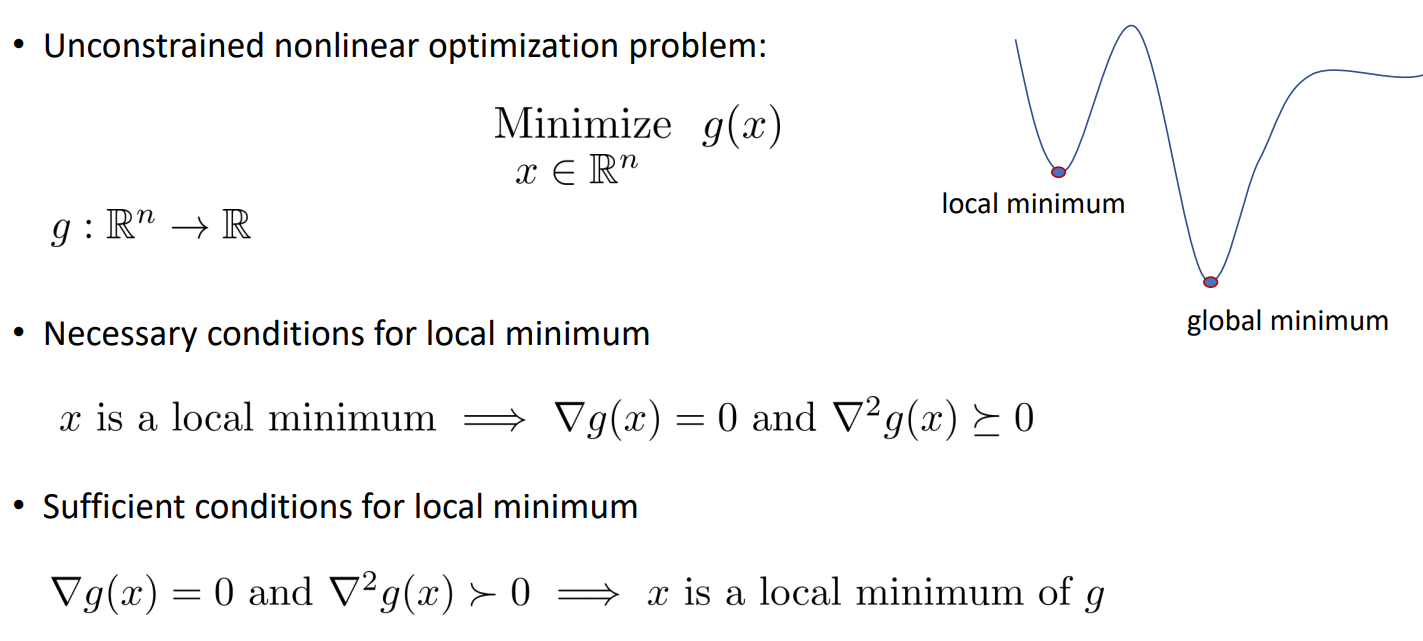
where \(\nabla g(x)=\left(\begin{array}{c} \frac{\partial g}{\partial x_{1}} \\ \frac{\partial g}{\partial x_{2}} \\ \vdots \\ \frac{\partial g}{\partial x_{n}} \end{array}\right) \quad \nabla^{2} g(x)=\left(\begin{array}{cccc} \frac{\partial^{2} g}{\partial x_{1}^{2}} & \frac{\partial^{2} g}{\partial x_{1} \partial x_{2}} & \cdots & \frac{\partial^{2} g}{\partial x_{1} \partial x_{n}} \\ \frac{\partial^{2} g}{\partial x_{2} \partial x_{1}} & \frac{\partial^{2} g}{\partial x_{2}^{2}} & \cdots & \frac{\partial^{2} g}{\partial x_{2} \partial x_{n}} \\ \vdots & \vdots & \ddots & \vdots \\ \frac{\partial^{2} g}{\partial x_{n} \partial x_{1}} & \frac{\partial^{2} g}{\partial x_{n} \partial x_{2}} & \cdots & \frac{\partial^{2} g}{\partial x_{n}^{2}} \end{array}\right)\)
Method 1: gradient descent (1st order)
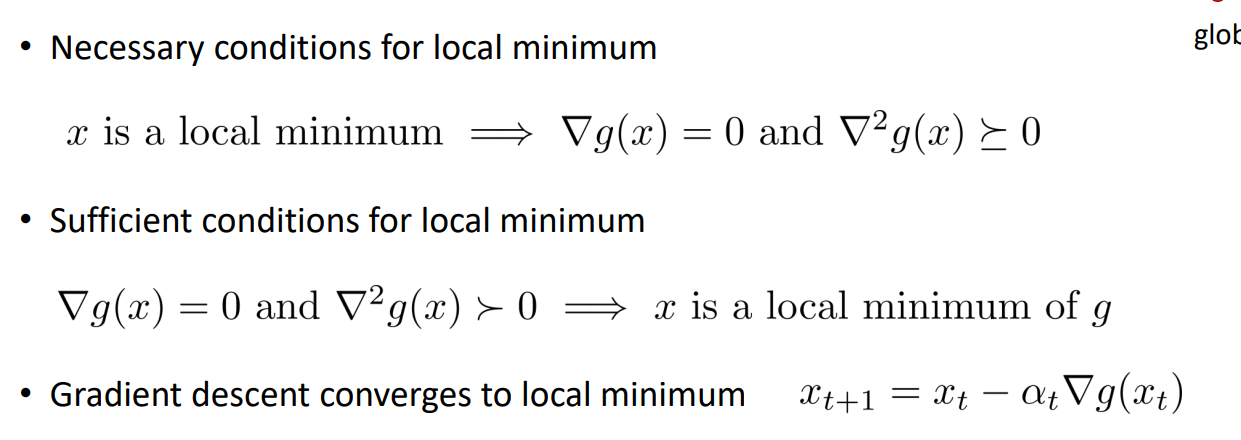
Method 2: Gauss-Newton Method (2nd order)
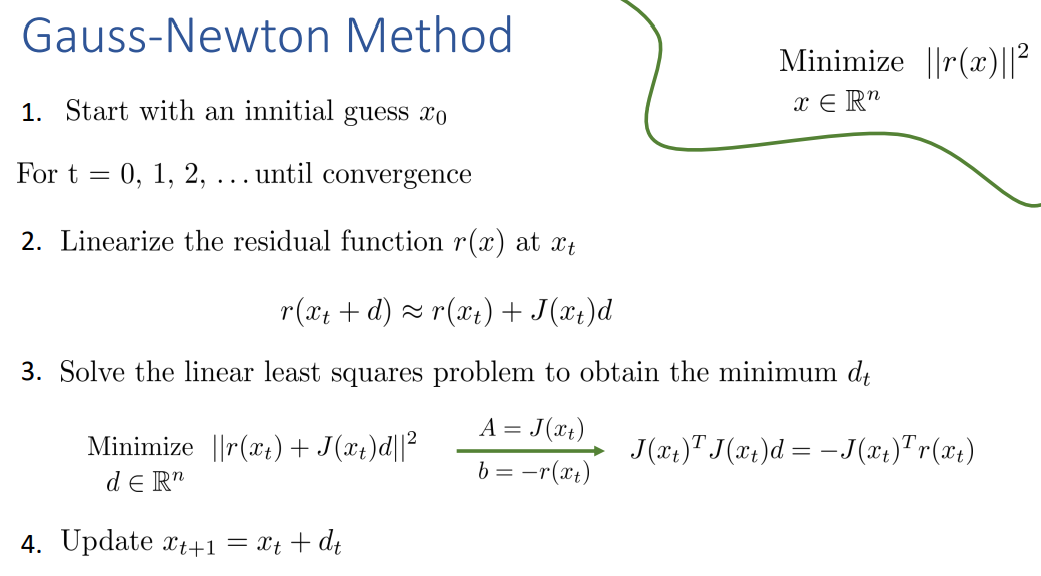
- $r: \mathbb{R}^{n} \rightarrow \mathbb{R}^{m}$ and $r(x)=\left[r_{1}(x), r_{2}(x), \ldots r_{m}(x)\right]^{T}$
- First-order Taylor approximation \(r_{i}(x) \approx r_{i}\left(x_{0}\right)+\nabla r_{i}\left(x_{0}\right)^{T}\left(x-x_{0}\right) \text { for every } i=1,2, \ldots m\) compile them to get \(r(x) \approx r\left(x_{0}\right)+J\left(x_{0}\right)\left(x-x_{0}\right) \quad \text { where } \quad J\left(x_{0}\right)=\left(\begin{array}{c}\nabla r_{1}\left(x_{0}\right)^{T} \\ \nabla r_{2}\left(x_{0}\right)^{T} \\ \vdots \\ \nabla r_{m}\left(x_{0}\right)^{T}\end{array}\right)\) Holds for any $x_{0} \in \mathbb{R}^{n}$
Back to Nonlinear Least Square Again
很多 nonlinear least square 是不容易把 summation 去掉。或是要求 gradient of summation of nonlinear function 不容易。例如在 SfM 或是 bundle adjustment.
此時就有不同的 numerical 算法:例如 Ceres (from Google) or G2O.
Ceres can solve bounds constrained robustified non-linear least squares problems of the form \(\begin{array}{cl} \min _{\mathbf{x}} & \frac{1}{2} \sum_{i} \rho_{i}\left(\left\|f_{i}\left(x_{i_{1}}, \ldots, x_{i_{k}}\right)\right\|^{2}\right) \\ \text { s.t. } & l_{j} \leq x_{j} \leq u_{j} \end{array}\) Problems of this form comes up in a broad range of areas across science and engineering - from fitting curves in statistics, to constructing 3D models from photographs in computer vision.
$\rho_i$ 稱爲 loss function is a scalar function that is used to reduce the influence of outliers on the solution of non-linear least squares problem.
A special case, when $\rho_i(x) = x$, 就變成熟悉的 non-linear least squares problem.
以上的 nonlinear least square optimization 可以用 ceres, G2O, Eigen, 等等 function 求解。我們看一個例子。
[@yoshinoSLAMEssense2021]
G2O Flow Chart
相較於Ceres而言,G2O函數庫相對較為覆雜,但是適用面更加廣,可以解決較為覆雜的重定位問題。Ceres庫向通用的最小二乘問題的求解,定義優化問題,設置一些選項,可通過Ceres求解。
而圖優化 (graph optimization),是把優化問題表現成圖的一種方式,這裏的圖是圖論意義上的圖。一個圖由若干個頂點,以及連著這些頂點的邊組成。在這裏,我們用頂點表示優化變量,而用邊表示誤差項。
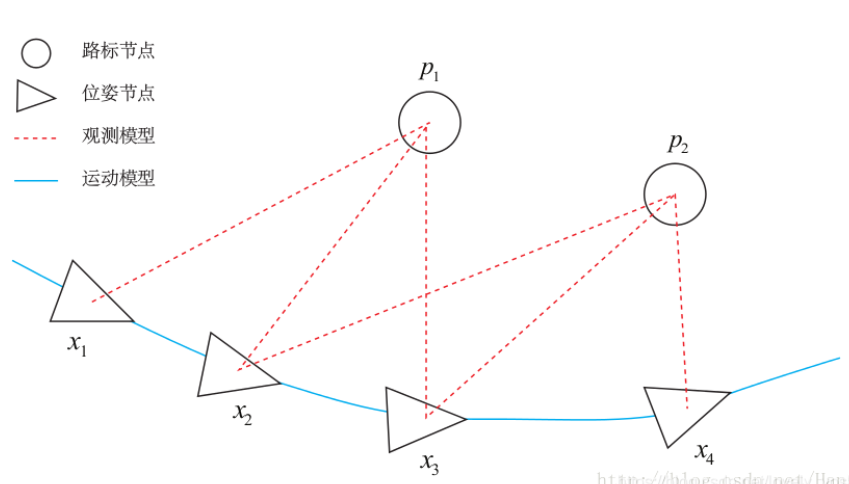
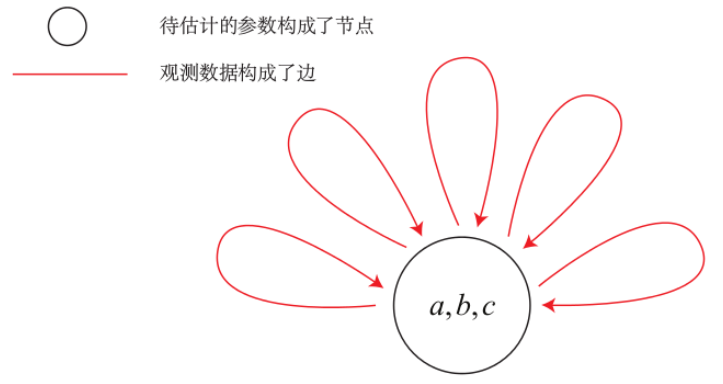
為了使用g2o,首先要將曲線擬合問題抽象成圖優化。這個過程中,只要記住節點為優化變量,邊為誤差項即可。曲線擬合的圖優化問題可以畫成以下形式:
我們直接看 G2O 的 flow chart:
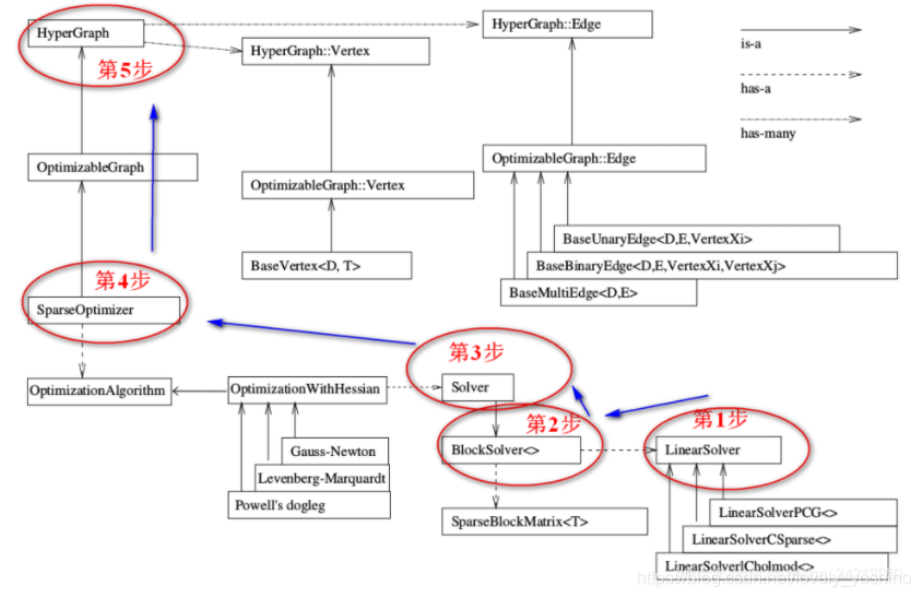
對這個結構框圖做一個簡單介紹(註意圖中三種箭頭的含義(右上角註解)):
(1)整個g2o框架可以分為上下兩部分,兩部分中間的連接點:SparseOpyimizer 就是整個g2o的核心部分。
(2)往上看,SparseOptimizer 其實是一個Optimizable Graph,從而也是一個超圖(HyperGraph)。
(3)$\color{#4285f4}{頂點和邊:}$超圖有很多頂點和邊。頂點繼承自 Base Vertex,用來描述優化的變量。邊用來描述誤差項。
(4)$\color{#4285f4}{配置SparseOptimizer的優化算法和求解器:}$往下看,SparseOptimizer包含一個優化算法部分OptimizationAlgorithm,它是通過OptimizationWithHessian 來實現的。其中叠代策略可以從Gauss-Newton(高斯牛頓法,簡稱GN)、 Levernberg-Marquardt(簡稱LM法)、Powell’s dogleg 三者中間選擇一個(常用的是GN和LM)。
(5)$\color{#4285f4}{如何求解:}$對優化算法部分進行求解的時求解器solver,它實際由BlockSolver 組成。BlockSolver由兩部分組成:一個是SparseBlockMatrix,它由於求解稀疏矩陣(Jocobian和 Hessian);另一個部分是LinearSolver,它用來求解線性方程 得到待求增量,因此這一部分是非常重要的,它可以從PCG/CSparse/Choldmod選擇求解方法。
在程序中的反應為:
- 創建一個線性求解器LinearSolver。
- 創建BlockSolver,並用上面定義的線性求解器初始化。
- 創建總求解器solver,並從GN/LM/DogLeg 中選一個作為叠代策略,再用上述塊求解器BlockSolver初始化。
- 創建圖優化的核心:稀疏優化器(SparseOptimizer)。
- 定義圖的頂點和邊,並添加到SparseOptimizer中。
最後設置優化參數,開始執行優化。具體的 coding, 可以參考 [@yoshinoSLAMEssense2021]