Reference
Question
Complex eigenvalue 代表什麽意義 in GA?
(1) Geometric Algebra in 2D - Linear Algebra and Cramer’s Rule - YouTube : from GA viewpoint of linear algebra
Introduction
兩個角度看 Geometric Algebra (GA): (1) 歷史角度和 (2) 幾何角度。
歷史角度:
- 笛卡爾開創結合幾何和代數的先河,引入笛卡爾坐標系。
- 高斯引入 (2D) 複數平面,成功的賦予複數 $i$ 幾何意義,就是逆時針旋轉 90 度。一個複數平面的 vector $(x,y) = x + iy$, 可以加、減、乘、除一個複數得到新的 vector. 加和減對應 vector 的加法和減法。更驚奇的是乘法和除法。乘或除一個實數對應 vector 的放大或縮小。乘或除虛數 $i$ 卻是對應 vector 逆時針或順時針旋轉 90 度。如果是乘或除複數就是對應 vector 的縮放和旋轉 (scale and rotation). 黎曼進一步解析延拓,開創了複變分析的數學分支。
- 很自然的下一步就是拓展到 (3D) 空間幾何。最初 Hamilton (1843) 的 quaternion 似乎是衆望所歸。不過有幾個問題:
-
The basis vectors square to -1 and not +1, i.e. $i^2 = j^2 = k^2 = ijk = -1$ and $i j = k$ 因此很多物理量變得非常奇怪,例如 kinetic energy: $\frac{1}{2} m \boldsymbol{v}^2 = - \frac{1}{2} m \boldsymbol{v} ^2$ -
Why 2D 複數沒有這個問題? 因爲 2D 用 complex conjugate $\frac{1}{2} m \boldsymbol{v} \boldsymbol{v}^* = \frac{1}{2} m \boldsymbol{v} ^2 = \frac{1}{2} m (x^2 + y^2)$ - 3D quaternion 沒有 complex conjugate?
-
- All operations are non-commutative (rotation is non-commutative?)
- 需要額外加上第四個 scalar component, $a$, 多餘且無意義。
- 最主要的問題是 quaternion 的 basis vectors, $i, j, k$, 是對應 $x, y, z$ 軸的 90 度旋轉,少了 vector 的 scaling (or projection, or similarity) basis!? 從 group theory 角度,quaternion 只有 address su(2) symmetry.
-
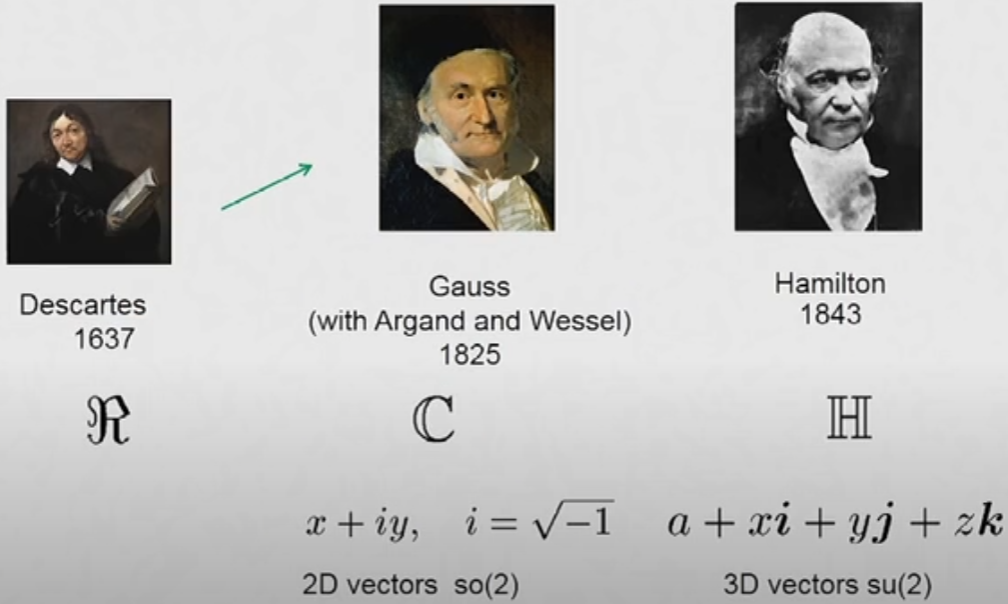
- 因此 Gibbs/Heaviside 的 vector $[x, y, z] = x e_i + y e_j + z e_k$, where $e_i^2 = e_j^2 = e_k^2 = 1$ 成爲主流迄今。
-
此時相反變成沒有 rotation 的 basis! 例如 $[x, y, 0]$ 的 vector 無法乘、除一個 vector 產生 $e_k$ 方向的 component!
-
Tensor 的 covariant and contravariant coordinate 無法解決這個問題!Really? TBC.
-
解決這個問題需要定義新的 vector multiplication, 就是外積或是 curl, $A \times B$ or $\nabla \times B$ operations.
-
Vector product 定義:
-
Inner product 内積是一個 scalar
-
(坐標系無關) 幾何:大小 $\vec{u} \cdot \vec{v} = |\vec{u}| | \vec{v}| \cos(\theta)$ , 沒有方向。物理意義就是$u, v$ 的相似度。
-
$\vec{u} \cdot \vec{v} = (a_1 e_1 + b_1 e_2 + c_1 e_3)\cdot(a_2 e_1 + b_2 e_2 + c_3 e_3) = a_1 a_2 +b_1 b_2 + c_1 c_2$
-
-
Cross product 叉積是一個 vector
-
(坐標系無關) 幾何 :大小 $\vec{u} \times \vec{v} = |\vec{u}| | \vec{v}| \sin(\theta)$ , 方向是 normal direction。物理意義就是 $u, v$ 圍的面積。
-
$\vec{u} \times \vec{v} = (a_1 e_1 + b_1 e_2 + c_1 e_3)\times (a_2 e_1 + b_2 e_2 + c_2 e_3) = (b_1 c_2 - c_1 b_2) e_1 + (c_1 a_2 - a_1 c_2) e_2 + (a_1 b_2 - b_1 a_2) e_3 $ where $e_i \times e_i = 0 $ and $e_i \times e_j = e_k$. $B \times A = -A \times B$
-
-
Outer product 外積是一個 bi-vector: 方向是第一 vector 到第二 vector 的手性方向
- (坐標系無關) 幾何:大小 $\vec{u} \wedge \vec{v} = |\vec{u}| | \vec{v}| \sin(\theta)$ , 物理意義就是 $u, v$ 圍的面積。方向是 $i$ (2D)
- $\vec{u} \wedge \vec{v} = (a_1 e_1 + b_1 e_2 + c_1 e_3)\wedge (a_2 e_1 + b_2 e_2 + c_2 e_3) = (b_1 c_2 - c_1 b_2) e_2 e_3 + (a_1 c_2 - a_2 c_1) e_1 e_3 + (a_1 b_2 - b_1 a_2) e_1 e_2 $ where $e_i \wedge e_i = 0 $. $B \times A = -A \times B$ 到此都和 cross product 一樣
- 3D $e_1 e_2 e_3 = i$ 所以 $\vec{u} \wedge \vec{v} = (b_1 c_2 - c_1 b_2) e_2 e_3 + (c_1 a_2 - a_1 c_2) e_1 e_3 + (a_1 b_2 - b_1 a_2) e_1 e_2 = i \vec{u} \times \vec{v} $
-
以上看起來 cross product 好像和 outer product 一樣? No, there are several difference
-
大小是一樣
-
叉積得到 vector, 外積得到 bi-vector.
- 叉積在 2D 不存在,外積在 2D 等價與複數運算。
-
在 2D 沒有定義 cross product, 但可以定義 outer product (引入 $i$)
-
在 3D cross product 和 outer product 的特性不同。 cross product 仍然是一個 vector, outer product 是 bi-vector.
-
vector 的手性和 bi-vector 不同,也無法相加。
- 在 3D space, 可以把 cross product 和 outer product 用 $\vec{u} \wedge \vec{v} = i \vec{u} \times \vec{v} $ link 起來!
-
-
Caveat: 不像 Gauss 定義的 2D complex plane, 複數可以加、減、乘、除。以上的 vector space inner product 或 cross-product 沒有逆運算! 後面會提到 GA product 有逆運算 Tensor 有除法嗎? TBC
-
-
-
**Clifford 定義 geometric vector product (幾何積, 乘法): **
-
(坐標系無關) 幾何:**$\vec{u} \vec{v} = \vec{u} \cdot \vec{v} + \vec{u} \wedge \vec{v} = |\vec{u}| | \vec{v}| (\cos(\theta)+i\sin(\theta)) = |\vec{u}| | \vec{v}| \exp(i\theta)$ **
-
$\vec{u} \cdot \vec{v}$ 是標準内積。 $\vec{u} \wedge \vec{v}$ 是外積!GA 就是内積加上“外積”,可以推導一些特性:
-
$\vec{u} \vec{u} = \vec{u} \cdot \vec{u} = |\vec{u}|^2 \to \vec{u}^{-1} = \frac{\vec{u}}{|\vec{u}|^2}$
-
$\vec{u} \vec{v} = \vec{u} \cdot \vec{v} + \vec{u} \wedge \vec{v} = |\vec{u}| | \vec{v}| \exp(i\theta) \to \vec{v} \vec{u} = \vec{u} \cdot \vec{v} - \vec{u} \wedge \vec{v} = = |\vec{u}| | \vec{v}| \exp(-i\theta) = (\vec{u} \vec{v})^* $ 其實就是 conjugate operation.
-
$\vec{u} \cdot \vec{v} = \frac{1}{2}(\vec{u} \vec{v} + \vec{v} \vec{u}) \text{ and } \vec{u} \wedge \vec{v}= \frac{1}{2}(\vec{u} \vec{v} - \vec{v} \vec{u})$
-
-
-
**比較有趣的是 Bivector product? 3D: ** $\vec{U} \vec{V} = \vec{U} \cdot \vec{V} + \vec{U} \wedge \vec{V}$
- **見後面討論 **
GA Basis
我們落實到直角坐標系。Q: 需要限制在直角坐標系嗎?
- $e_i e_i = 1$ (scalar) and 定義 bi-vector: $e_i e_j = - e_j e_i$ when $i \ne j$
- 我們可以檢查 GA 的 vector 乘 vector, 先看 2D. 在 2D 情況:$\hat{x}\hat{y} = i$
- 我們可以檢查 GA 的 vector 乘 vector, 在 3D 情況:$\hat{x}\hat{y}\hat{z} = i$
- vector 乘 vector 得到 scalar + bivector. 我們可以定義任何 bivector 乘 bivector 或是 vector 得到更多的變化。
- In general
- 2D multivector: $a + b \hat{x} + c \hat{y} + d \hat{x}\hat{y}$
- 3D multivector: $a + b \hat{x} + c \hat{y} + d \hat{z} + e \hat{x}\hat{y} + f \hat{y}\hat{z} + g \hat{x}\hat{z} + h \hat{x}\hat{y}\hat{z}$
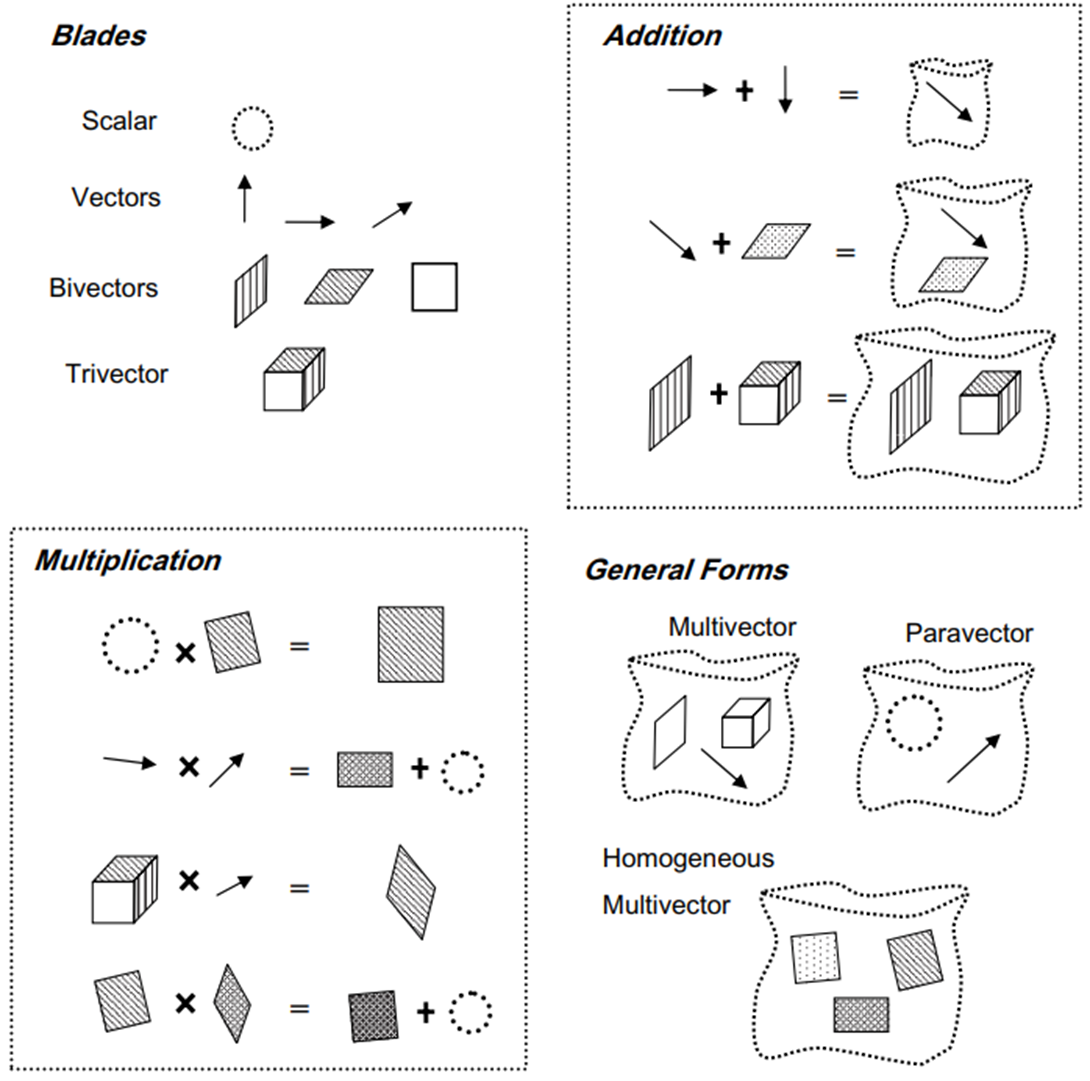
幾何角度
另一個是幾何角度,下圖提供簡單的圖示。
- Scalar 基本代表 scale or magnitude;vector 則有 vector scale 和 vector 方向;Bi-vector 的大小是面積也有方向 (是面積的方向,不是 normal 的方向);Tri-vector 的大小是體積,沒有方向?
- GA 的加法就是同一類的 component 可以相加,不同類 component 互不干涉。
- GA 的乘法前兩類已經討論過。比較特別的是 trivector 乘 vector 得到 bivector; bivector 乘 bivector 得到 bivector 加上 scalar? Yes.
GA in 1D Geometry (2D Algebra Space Including Imaginary Part)
- trivia case, only scalar+pseudo-scalar ($i$): $a+bi$, dimension of 2.
-
$i$ 的意義就是旋轉 90 度 in the complex plan (not in the geometry!!) \(\begin{gathered}\text{(scalar+pseudo-scalar)(scalar+pseudo-scalar)}\quad(a+b i)(c+d i)=(a c-b d)+(a d+b c) i \end{gathered}\)
- 結果仍然是 scalar + pseudo-scalar, 沒有什麽 surprise.
GA in 2D Geometry (4D Algebra Space Including Imaginary Part)
- Vector: $\vec{u} = a \hat{x} + b \hat{y}$
- In general: $V = a + b \hat{x} + c \hat{y} + d \hat{x}\hat{y}$
-
更重要 bi-vector (also 2D pseudo-scalar): $i = \hat{x}\hat{y}$. 2D $i$ 幾何意義就是旋轉 90 度 in the 2D geometry。
-
Example: $\vec{v} = 2 \hat{x} + 3 \hat{y} \to \vec{v} i = 2 \hat{x}\hat{x}\hat{y} + 3 \hat{y}\hat{x}\hat{y} = -3 \hat{x} + 2 \hat{y} $, 逆時針轉 90 度
-
Example: $\vec{v} = 2 \hat{x} + 3 \hat{y} \to i \vec{v} = 2 \hat{x}\hat{y}\hat{x} + 3 \hat{x}\hat{y}\hat{y} = 3 \hat{x} - 2 \hat{y} $, 順時針轉 90 度
-
- (vector) (vector) = scalar (inner product) + bi-vector (outer product)
- (bivector) (bivector) = scalar; 2D bivector 其實就是 (pseudo)-scalar.
-
(vector) (scalar + bivector) = vector
- 所以 $V = a + b \hat{x} + c \hat{y} + d i$, i.e. scalar+pseudo-scalar (2), vector (2): dimension of 4.
GA in 3D Geometry (8D Algebra Space Including Imaginary Part)
- Vector: $\vec{u} = a \hat{x} + b \hat{y} + c\hat{z}$
-
In general:
- 2D multivector: $a + b \hat{x} + c \hat{y} + d \hat{x}\hat{y}$
- 3D multivector: $a + b \hat{x} + c \hat{y} + d \hat{z} + e \hat{x}\hat{y} + f \hat{y}\hat{z} + g \hat{x}\hat{z} + h \hat{x}\hat{y}\hat{z}$
-
更重要 tri-vector (also 3D pseudo-scalar): $i = \hat{x}\hat{y}\hat{z}$. 3D $i$ 幾何意義“不是”旋轉 90 度. $A i = iA$
-
Example: $\vec{v} = \hat{x} \to \vec{x} i = \hat{x}\hat{x}\hat{y}\hat{z} = \hat{y} \hat{z} $: vector 乘 $i$ 變成 bi-vector, 方向 follow 右手性。(或是從平面變成 normal vector)
-
Example: $\vec{v} = \hat{x}\to i \vec{x} = \hat{x}\hat{y}\hat{z}\hat{x} = \hat{y}\hat{z}$: 同樣結論。
-
Example: $i \hat{y}\hat{z} = \hat{x}\hat{y}\hat{z}\hat{y}\hat{z} = -\hat{x}$: bi-vector 乘 $i$ 變成 vector, 方向 follow 左手性。
-
所以在 3D (NOT 2D!), 可以用 $i$ 互換 cross product and outer product
- $\vec{u}\times\vec{v} = i \vec{u}\wedge\vec{v} = \vec{u}\wedge\vec{v} i$
- 3D 的旋轉 $T$ 度比較複雜! : $e^{\hat{x}\hat{y}\frac{T}{8}} \vec{v} e^{\hat{x}\hat{y}\frac{T}{8}}$
-
- 所以 $V = a + b \hat{x} + c \hat{y} + d \hat{z} + e i \hat{z} + f i \hat{x} + g i \hat{y} + h i $, i.e. scalar+pseudo-scalar (2), vector (3), pseudo-vector (3): dimension of 8.
- (vector) (vector) = scalar (inner product) + bi-vector (outer product)
- $(a \hat{x}+b \hat{y} + c\hat{z})(d \hat{x}+e \hat{y} + f\hat{z})=(a d+b e + cf)+(ae-bd)\hat{x}\hat{y}+(bf-ce)\hat{y}\hat{z}+(af-cd)\hat{x}\hat{z} $
- (bivector) (bivector) = scalar (bivector inner product) + bi-vector (outer product)
- $(a\hat{x}\hat{y}+b\hat{y}\hat{z}+c\hat{z}\hat{x})(d\hat{x}\hat{y}+e\hat{y}\hat{z}+f\hat{z}\hat{x})=-(a d+b e + cf)+(ae-bd)\hat{x}\hat{z}+(bf-ce)\hat{y}\hat{x}+(af-cd)\hat{y}\hat{z} $
- (vector) (bivector) = (psedu)-scalar + vector
- $(a \hat{x}+b \hat{y} + c\hat{z})(d\hat{y}\hat{z}+e\hat{z}\hat{x}+f\hat{x}\hat{y})=i(a d+b e + cf)+(ce-bf)\hat{x}+(af-dc)\hat{y}+(bd-ae)\hat{z} $
GA in 4D Geometry (16D Algebra Space Including Imaginary Part?)
- Vector: $\vec{u} = a \hat{x} + b \hat{y} + c\hat{z} + d\hat{t}$
- 4D multivector: $V = a + b \hat{x} + c \hat{y} + d \hat{z} + e \hat{t} + f \hat{x}\hat{y} + g \hat{y}\hat{z} + h \hat{z}\hat{t} + k \hat{x}\hat{z} + l \hat{x}\hat{t} + m\hat{y}\hat{t} + n \hat{x}\hat{y}\hat{z} + o \hat{x}\hat{y}\hat{t} + p \hat{t}\hat{y}\hat{z} + q \hat{x}\hat{z}\hat{t} + r \hat{x}\hat{y}\hat{z}\hat{t}$
- $V = a + b \hat{x} + c \hat{y} + d \hat{z} + e \hat{t} + f \hat{x}\hat{y} + g \hat{y}\hat{z} + h \hat{z}\hat{t} + k \hat{x}\hat{z} + l \hat{x}\hat{t} + m\hat{y}\hat{t} + ni \hat{x} + o i\hat{y} + p i\hat{z} + q i\hat{t} + r i$, i.e. scalar+pseudo-scalar (2), vector (4), pseudo-vector (4), Bivector (6): dimension of 16.
- 4D: (vector) (vector) = scalar (inner product) + bi-vector (outer product)
- 但是 (bivector) (bivector) 不是 inner + outer!
GA Eigenvalue and Eigenvector
既然提到 vector, 自然就會聯想到 vector space, linear algebra, linear transformation, matrix multiplication, eigenvalue, eigenvector.
簡單 review vector space 和 linear transformation
- 假設 $f$ 是 linear transformation on a vector space, 可以被 extending linear transformation (outer morphism)
- Definition: $f(u\wedge v) = f(u)\wedge f(v)$
- Definition: $f(a\wedge b + c\wedge d) = f(u)\wedge f(v) + f(c)\wedge f(d)$
- Definition: $f(u\wedge v\wedge w) = f(u)\wedge f(v)\wedge f(w)$
- Eigenvector and eigenvalue: linear transformation 仍然維持原來的方向! scaling factor 就是 eigenvalue
- Eigen-trivector and eigen-trivalue: 因爲 tri-vector 沒有方向 (only + or -), 所以一定是 eigen-trivector! eigen trivalue $\lambda$ 就是 determinant!!!
- $f(u\wedge v\wedge w) = f(u)\wedge f(v)\wedge f(w) = \lambda (u\wedge v\wedge w)$
- Eigen bivector and eigen bivalues: 就是 preserve bi-vector 的方向 (rotation!) rotation angles 就是 eigen bivalue?!!
- $f(u\wedge v) = \lambda f(u)\wedge f(v) = \lambda (u\wedge v)$ where $\lambda = \alpha^2 + \beta^2$ 是一個 real value
- 這是什麽意思,就是兩個 vectors 經過 linear transformation, 仍然落在同一個平面上!!!! (但是不需要同一個方向!!!)
- 但是 2D 不全部都落在同一個平面? 需要保角度嗎 (conformal?) 。2D 的 i 代表 e1 e2, 就是轉 90 度
- 3D 的i 代表 e1 e2 e3 , 代表落在 2D 平面就 ok??
###
3D linear transformation 的 eigenvalue and eigenvectors
- vector: preserved vector 方向: value scaling factor : eigenvector and real value eigenvalue: 長度的 ratio
- bivector: scaled rotation 方向: eigen bivector and complex eigen value: (面積的 ratio?)
- trivector: volume ratio!
| Real eigenvector | Real eigenvalue | Complex eigenvector | Complex eigenvalue | |
|---|---|---|---|---|
| 2D real matrix | Preserve vector 方向 | Vector 長度 ratio | ||
| 2D complex matrix | Preserve ? | |||
| 3D real matrix | Preserve vector 方向 | Vector 長度 ratio | Preserve bivector 方向 | Bivector 面積 ratio conjugate? |
| 3D complex matrix | ||||
| 4D real matrix | Preserve vector 方向 | Vector 長度 ratio | Preserve bivector 方向 | Bivector 面積 ratio |
| 4D complex matrix |
2D
Given a 2D real linear transformation A, 可以分解成兩類
- Real eigenvalue: $A = Q D Q^{-1}$, D 是 diagonal matrix with 2 real eigenvalues. Q 的 2 個 column vectors 對應兩個 real eigenvectors. A 就是旋轉, scale, 再反旋轉? eigenvector preserve 方向,只有 scale.
- 如果 A 是對稱矩陣,Q = Q-1 and 2 個 column eigen-vectors 是正交 vectors!! 但如果 A 不是對稱矩陣,則 Q =~ Q! and eigen-vector 非正交!!
- Complex eigenvalue: $A = [\cos\theta, -\sin\theta; \sin\theta, \cos\theta]$ 代表逆時針旋轉 $\theta$ 度。D 是 diagonal matrix with $\exp(\pm i \theta)$ eigenvalues. $Q = = [\cos\frac{\theta}{2}, -\sin\frac{\theta}{2}; \sin\frac{\theta}{2}, \cos\frac{\theta}{2}]$ 此時應該用 bivector 來看. $A (u\wedge v) = A u \wedge A v = \lambda (u\wedge v)$ and $\lambda=1$ 是實數。在 2D $u\wedge v$ 的大小就是 $u$ and $v$ vector 包出的面積。沒有方向因為都是 pseudo-scalar (i). 也就是保面積的 linear transformation, 就是旋轉。
| Eigenvalue | Real Eigen (vec/bivec/trivec) | Complex eigenvector | |
|---|---|---|---|
| Vector | Real if vector preserve 方向 $i$ if it’s a rotation matrix with $\theta$ $\alpha+\beta i$ if it’s scaled rotor |
Vector 長度 ratio | |
| Bi-vector pseudo-scalar, $i$ |
1 if it’s a rotation matrix with $\theta$ $\alpha^2+\beta^2$ if it’s scaled rotor |
area ratio is 1 | |
| Tri-vector | det(A) | ratio of volume | always real (only +/-) |
2D, 1 or 2 互斥 (scale or scaled rotation)
- 一定存在: 面積的比

3D, 1 一定存在可能是 1 or 3 個方向
3D, 2 不一定存在,如果是旋轉坐標就存在 ; complex eigenvalue
3 永遠存在 (但 eigen trivector, i.e. determiant 可能為 0)
Spacetime Physics with Geometric Algebra1
Ray tracing: Geometric Algebra for Computer Science
SLAM: Geometric Algebra Applications Vol. I Computer Vision, Graphics and Neurocomputing
NeRF?/NAF
Medical image
Applications
Spacetime Physics with Geometric Algebra1
Ray tracing: Geometric Algebra for Computer Science
SLAM: Geometric Algebra Applications Vol. I Computer Vision, Graphics and Neurocomputing
NeRF?/NAF
Medical image
Machine learning?
Machine Learning
GA 的 scalar 是 cosine similarity; bivector 是 sine area.
可以用來取代 cosine similarity 嗎?
Application in Physics
Maxwell Equation
首先定義: \(\begin{aligned} \nabla &=\frac{1}{c} \frac{\partial}{\partial t}+\vec{\nabla} \\ \vec{\nabla}&= \frac{\partial}{\partial x} \hat{x}+\frac{\partial}{\partial y} \hat{y}+\frac{\partial}{\partial z} \hat{z} \\ J &=c \rho-\vec{J} \\ F &=\vec{E}+i c \vec{B} \\ \end{aligned}\)
- $\vec{B}$ is bivector, $i$ 是 trivector, 所以 $i \vec{B}$ 變成 vector 可以和 $\vec{E}$ 一致
- $\rho$ 是 scalar, $\vec{J}$ 是 vector.
- Caveat: $\nabla F = \nabla \cdot F + \nabla \wedge F$
Maxwell Equation 可以簡化成: \(\begin{aligned} &\text{Maxwell Equation: } \nabla F = \frac{J}{c \varepsilon_0} \\ \Rightarrow &\left(\frac{1}{c} \frac{\partial}{\partial t}+\vec{\nabla}\right)(\vec{E}+i c \vec{B})=\frac{c \rho-\vec{J}}{c \varepsilon_0}\\ & \vec{\nabla} \cdot \vec{E}+\frac{1}{c} \frac{\partial \vec{E}}{\partial t}+i c \vec{\nabla} \wedge \vec{B}+\vec{\nabla} \wedge \vec{E}+i \frac{\partial \vec{B}}{\partial t}+i c \vec{\nabla} \cdot \vec{B}=\frac{\rho}{\varepsilon_0}-\frac{\vec{J}}{c \varepsilon_0} \\ \Rightarrow & \text{ (scalar, Gauss Law) }\vec{\nabla} \cdot \vec{E}=\frac{\rho}{\varepsilon_0} \\ & \text{ (vector, Ampere Law) } \frac{1}{c} \frac{\partial \vec{E}}{\partial t}+i c \vec{\nabla} \wedge \vec{B}=-\frac{\vec{J}}{c \varepsilon_0} \longrightarrow \vec{\nabla} \times \vec{B} - \mu_0 \varepsilon_0 \frac{\partial \vec{E}}{\partial t} =\mu_0 \vec{J} \\ & \text{ (bivector, Faraday Law) } \vec{\nabla} \wedge \vec{E}+i \frac{\partial \vec{B}}{\partial t}=0 \longrightarrow \vec{\nabla} \times \vec{E}+ \frac{\partial \vec{B}}{\partial t}=0\\ & \text{ (trivector) } i c \vec{\nabla} \cdot \vec{B}=0 \longrightarrow \vec{\nabla} \cdot \vec{B}=0 \\ \end{aligned}\)
Rotor and Spinor
GA 的缺點
似乎很明顯,
- 就是 dimension 太多: 2D 還好,只有 4 dimension: 1 (scalar) + 2 (vectors) + 1 (bivector, scalar)
3D 需要 8 dimension: 1 (scalar) + 3 (vectors) + 3 (bivector) + 1 (trivector, scalar)
= 8. 如果 4D 需要 16 dimension.
-
How to reconcile the $i$ difference between 2D and 3D? No problem at all, 2D 的 $i$ 就是 $\hat{e}_1 \hat{e}_2 = - \hat{e}_2 \hat{e}_1 \to (\hat{e}_1 \hat{e}_2)^2 = \hat{e}_1 \hat{e}_2 \hat{e}_1 \hat{e}_2 = - \hat{e}_1 \hat{e}_2 \hat{e}_2 \hat{e}_1 = -1$
-
3D 的 $i = e_1 e_2 e_3$ = $(\hat{e}_1 \hat{e}_2 \hat{e}_3)^2 = \hat{e}_1 \hat{e}_2 \hat{e}_3 \hat{e}_1 \hat{e}_2 \hat{e}_3 = - \hat{e}_1 \hat{e}_2 \hat{e}_3 \hat{e}_1 \hat{e}_3 \hat{e}_2 = \hat{e}_1 \hat{e}_2 \hat{e}_3 \hat{e}_3 \hat{e}_1 \hat{e}_2 = (\hat{e}_1 \hat{e}_2)^2 = -1$
Citation
Geometric Algebra: very good!!!
https://www.youtube.com/watch?v=60z_hpEAtD8&ab_channel=sudgylacmoe
Tensor Calculus: MathTheBeautiful
3D case of Geometric algebra?
https://www.youtube.com/watch?v=e0eJXttPRZI&ab_channel=MathTheBeautiful
Covariance and Contra-variance of vector/tensor?
Unify covariance and contra-vairance of vector/tensor??
in Allen Lu MWEB: 相對論和張量分析 - Coordinate Covariant, Contravariant, Invariant (座標系協變,逆變,不變)
1-form and ? -form tensor calculus?
In Allen Poincaré conjecture/theorem and Ricci flow
Tensor calculus: Allen Lu MWEB: and Youtube maththebeautifu!!
https://www.youtube.com/watch?v=e0eJXttPRZI&ab_channel=MathTheBeautiful
Poincare Conjecture/Theorem and Ricci Flow
Differential geometry vs. Tensor Analysis vs. Geometric Algebra
Differential geomery base: 1. 座標無關,2. 曲面,3. Einstein symbol (covariant and contra variant == vector and 1-form???)
Tensor analysis: 1. 座標無關,2. 平面(?),3. Einstein symbol (vector and 1-form)
Geometric Algebra: 1. tightly coupled with 座標? 2. 平面 (no)?
我們從問題出發
- Tensor analysis/calculus 和 geometric algebra, 到底誰 cover 誰?
- Tensor 的基礎是座標不變性。在 geometric algebra 對應是什麼?
- Covariant and Contravariant 對應 geometric algebra 什麼?
- vector vs. 1-form, vector 對應 geometric algebra 的 2D, 1-form 對應什麼?
- Einstein symbol 在 geometric algebra 有表現嗎?
- 目前都是平面,在曲面或是 manifold, 那一個更 general?
- Manifold 也有 geometric algebra 嗎? exp map and tagent plane 有對應的表現嗎?
- Maxwell queation in different forms. General relativity in different forms!
(4) David Hestenes - Tutorial on Geometric Calculus - YouTube
