Source
Visual Differential Geometry and Forms: Tristan Needham! Excellent Book
Takeaway
我自己的領悟:幾何的重點是在找到坐標無關的 invariant properties!
-
Local 坐標 vs. Global 坐標的轉換。曲面最容易的坐標就是 local 坐標,基本是 intrinsic 幾何。
-
Local 坐標可以視爲平面坐標!可以坐標轉換,但是如何抓到坐標無關的幾何量是重點!x, y 換成極坐標。。。。
-
Global 坐標以前是 extrinsic 幾何 (bird eye view)。現在也是 intrinsic 幾何 (bug eye view)。不過 intrinsic 集合會遇到無法解決的問題,例如是平面還是圓柱面?因此拓撲就變成重要。
書中幾個重點:
曲率定義
-
用三角形角度 angular excess (0th-order): 最通用,可以拓展到 n 多邊形。分母是面積,比例是 $r^2$

where \(\mathcal{E} \equiv(\text{angle sum of triangle})-\pi .\)
-
用圓形周長 excess (1st-order): 是近似,極限相等。分母是 $r^3$

- 用圓形面積 excess (2nd-order): 是近似,極限相等。分母是 $r^4$
| 分子 | 分母 | 比例常數 | |
|---|---|---|---|
| 三角或多邊形角度 excess | $r^2$ | 1 | |
| 圓形周長 excess | $r^3$ | $3/\pi$ | |
| 圓形面積 excess | $r^4$ | $12/\pi$ |
Map
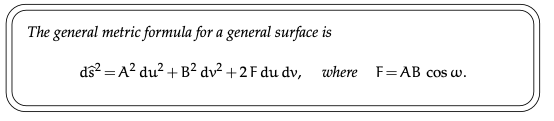
Metric vs. Curvature
簡單說就是
- 知道每一點的 metric 就完全知道這個曲面
- 可以說知道每一點的 curvature 就完全知道這個曲面嗎?
- Curvature (K) 基本是 metric (A, B) 的兩次微分
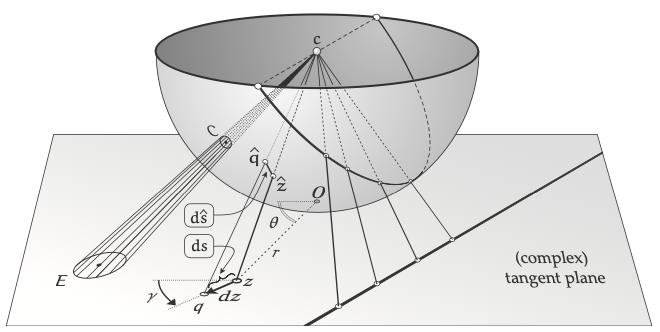
以下的 mapping 是 conformal mapping
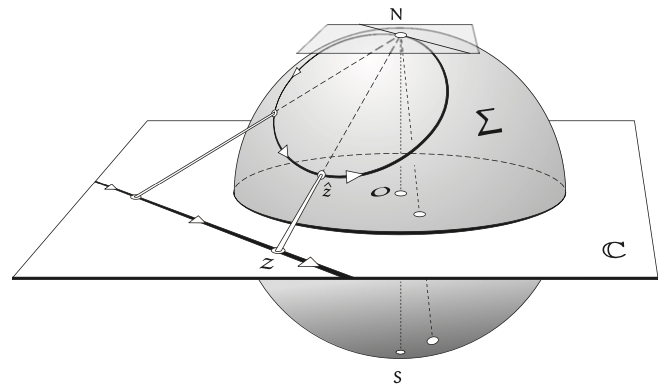
$\Lambda$ 基本就是 metric. 兩次微分基本是 Gaussian curvature.
| Creator | 黎曼幾何 | 歐氏幾何 | 羅氏幾何 |
|---|---|---|---|
| (Global) 曲面形狀 | 橢圓球面 | 平面 | 雙曲面 |
| (Global) 高中平行公理:直綫外一點有幾條直綫不相交 | 0 | 1 | $\ge 2$ |
| (Global) 三角內角和 | A > 180 | A = 180 | A < 180 |
| (Global) 圓周率 | $<\pi$ | $\pi$ | $>\pi$ |
| (Global/local) Holonomy: PT 沿著 close loop 的角度差 | H > 0 | H = 0 | H < 0 |
| (Global/local) Independence of PT (!PT): PT 在任兩點相同和軌跡無關 | No | Yes | No |
| (Local) 2D 高斯曲率純量: $R = \kappa_1 \kappa_2$ | $R > 0$ | $R = 0$ | $R < 0$ |
| (Local) 黎曼曲率張量: $R^a_{bcd}$ | $R \ne 0$ | $R = 0$ | $R \ne 0$ |
| (Local) Ricci 曲率張量: $R_{\mu\nu}$ | $R \ne 0$ | $R = 0$ | $R \ne 0$ |
| (Local) 連結 (connection): $\Gamma$? | $\Gamma \ne 0$ | $\Gamma = 0$ | $\Gamma \ne 0$ |
Introduction
發現有幾個主題,我每年或每幾年都會從新學習。可以看出我對幾何最有興趣,分析次之,代數最後。代表我還是視覺動物?
- 曲面幾何(非常頻繁):微分幾何,相對論,manifold learning
- 微積分(頻繁):基本/高等微積分 (Lebasque 積分/實數分析,向量/張量微積分,GA (Geometric Algebra 微積分)
- 群論(不頻繁)
[1.8] Harriot’s Theorem (I603): $\mathcal{E}(\Delta)=\mathcal{A}(\Delta) / R^2$. Adding these last three equations, we find that \(3 \mathcal{A}(\Delta)+\mathcal{A}\left(\Delta_\alpha\right)+\mathcal{A}\left(\Delta_\beta\right)+\mathcal{A}\left(\Delta_\gamma\right)=2(\alpha+\beta+\gamma) \mathrm{R}^2 .\)
Finally, subtracting (1.4) from (1.5), we find that \(\mathcal{A}(\Delta)=R^2(\alpha+\beta+\gamma-\pi)=R^2 \mathcal{\varepsilon}(\Delta),\)
In both Spherical and Hyperbolic Geometry, \(\mathcal{E}(\Delta)=\mathcal{K} \mathcal{A}(\Delta),\) where $\mathcal{K}$ is a constant that is positive in Spherical Geometry, and negative in Hyperbolic Geometry.
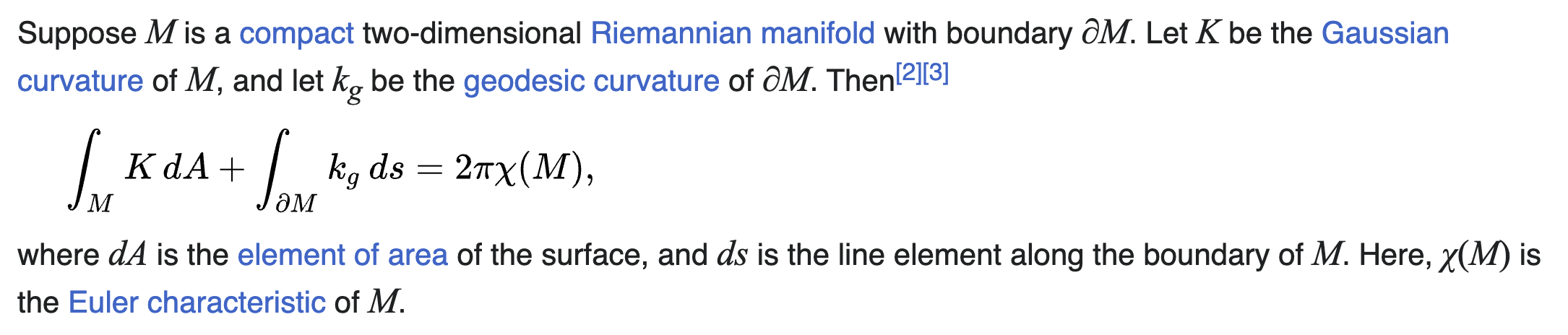
Gauss-Bonnet Theorem (不只結合 local/global, 同時連結 Geometry/Topology)
https://en.wikipedia.org/wiki/Gauss%E2%80%93Bonnet_theorem
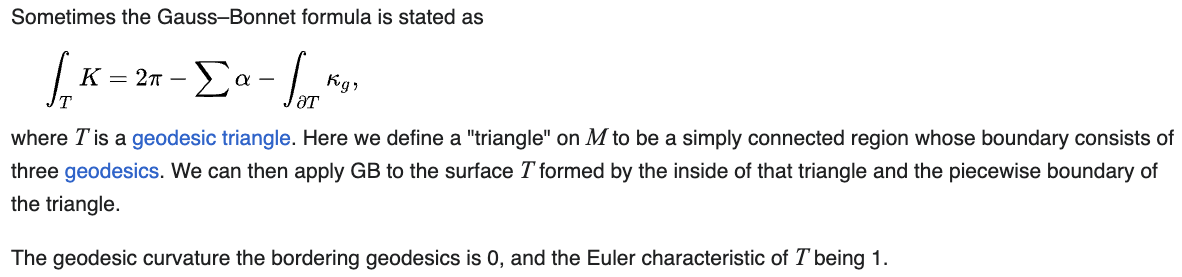
如果是 Geodesic Triangle:

幾何根據全域或局部以及外視或内視可以略分為 4 類:
-
Local (局部): 基於非常小區域 (微分=無窮小) 的特性,例如曲率 (curvature)、connection (covariant derivative)
- Global (全域): 基於 loop、transversal (軌跡)、大區域的特性,例如圓周率、三角形内角和、曲面的形狀
- Extrinsic view (外視): birds-eye-view (上帝視角) 即是 manifold 是嵌入更高維的歐式空間 (X, Y, Z 卡氏座標)
- Intrinsic view (內視): bugs-eye-view (毛毛蟲視角) 沒有參照坐標系,只能靠 manifold 本身的 objects (綫,角度,平行移動) 推導 manifold 的性質。結果應該和 extrinsic view 結果一致。
一個的例子説明不同的方式定義“直綫”。
| 直綫 | Extrinsic (Birds-Eye-View) | Intrinsic (Bugs-Eye-View) |
|---|---|---|
| Global (大區域) | 兩點之間最短“歐氏距離” 但限制在曲面上 | 兩點之間最短“度規距離” (metric distance) |
| Local (非常小區域,微分) | Acceleration vector (position vector 的二次微分) 的切平面的分量為 0 | 平行移動 (Parallel transport) 和此綫的切向量同向 |
更多 (但不完整) 的比較。
| Extrinsic (Birds-Eye-View) | Intrinsic (Bugs-Eye-View) | |
|---|---|---|
| Global (大範圍) | 1. X,Y,Z 卡氏座標 2. Position vector, $\vec{R}$ |
廣義相對論 |
| Local (非常小範圍,微分) | 1. Basis vector: $u=\frac{\partial \vec{R}}{\partial x}, v=\frac{\partial \vec{R}}{\partial y}$ 2. Mean curvature |
1. 切平面,切向量 basis vector 2. Gaussian/Riemann curvature |
非歐幾何關鍵:平行公理
垂直和平行都是幾何最重要的基石。
- 垂直的局部性質 (角度) 很直接,兩直線相交,夾角為 90 為垂直。一般人隨手可以畫出垂直相交線,即使在曲面也不例外。垂直的微分定義是兩直線切向量內積為 0.
- 平行的概念看似直接,兩直線永不相交,這是一個全域性質。在歐幾里德平面幾何很容易想像。兩個問題:(A) 這樣平行直線唯一嗎?或一定存在嗎? (B) 平行是否有局部的微分定義?
(A) 的回應就是平行公理;(B) 的回應就是平行移動 (parallel transport).
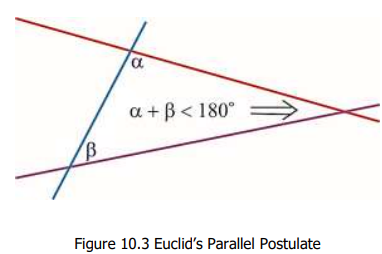
(A) 平行公理有幾種不同形式:
- 歐幾里德平面幾何五大公理,最後一個公理就是平行公理,簡寫為 Euclid‘s 5th Postulate (EFP):一條直綫 $l$ 與其他兩條直綫 $m$ 和 $m’$ 相交,且這些線段在 $l$ 的同側所形成的內角之和小於180度,則線段 m 和 m’ 將會在該側的某一點相交。
我們在高中學的是改良後的公理。
- High School Parallel Postulate (HSP):一條直綫 $l$ 與綫外一點 $P$,存在唯一的直綫 $l’$ 通過 $P$ 和 $l$ (平行) 不相交。
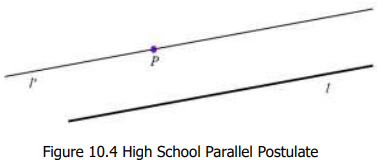
乍看很直觀,但有幾個問題
-
什麼是直線?
- 曲面上的直綫是 “geodesic”。有全域 (最短距離) 和局部 (acceleration vector 切向量為 0 或是基於 parallel transport ) 的定義
-
什麼是“永遠”不相交?還是相交在無限遠?數學家不喜歡沒有清楚的定義:永遠、極限、無限大/遠等等。
-
HSP 只存在一條直綫和原來直綫平行不相交?可以有無限條 (平行) 直綫不相交,或是沒有任何 (平行) 直綫不相交?
非歐 (曲面) 幾何
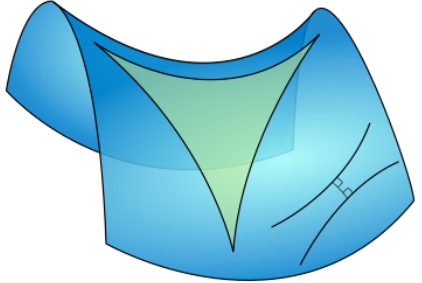
俄國數學家羅巴切夫斯基 (Lobachevsky) 一輩子想要其他公理證明平行公理或者用更直觀的公理取代平行公理都未能成功。後來用反證法:一條直線外一點一定會有兩條或兩條以上的 (平行) 直線和原來直綫不相交,試圖找出矛盾。但卻發現邏輯自洽。因而開創非歐幾何學。我們現在知道這其實對應雙曲面幾何如下。這是一個馬鞍面,立起來就是一個雙曲面。雙曲面上的”直線“線外一點可以找到無數 diverged “直線”,和原來的“直線”永不相交,因此可以有無數條平行線。
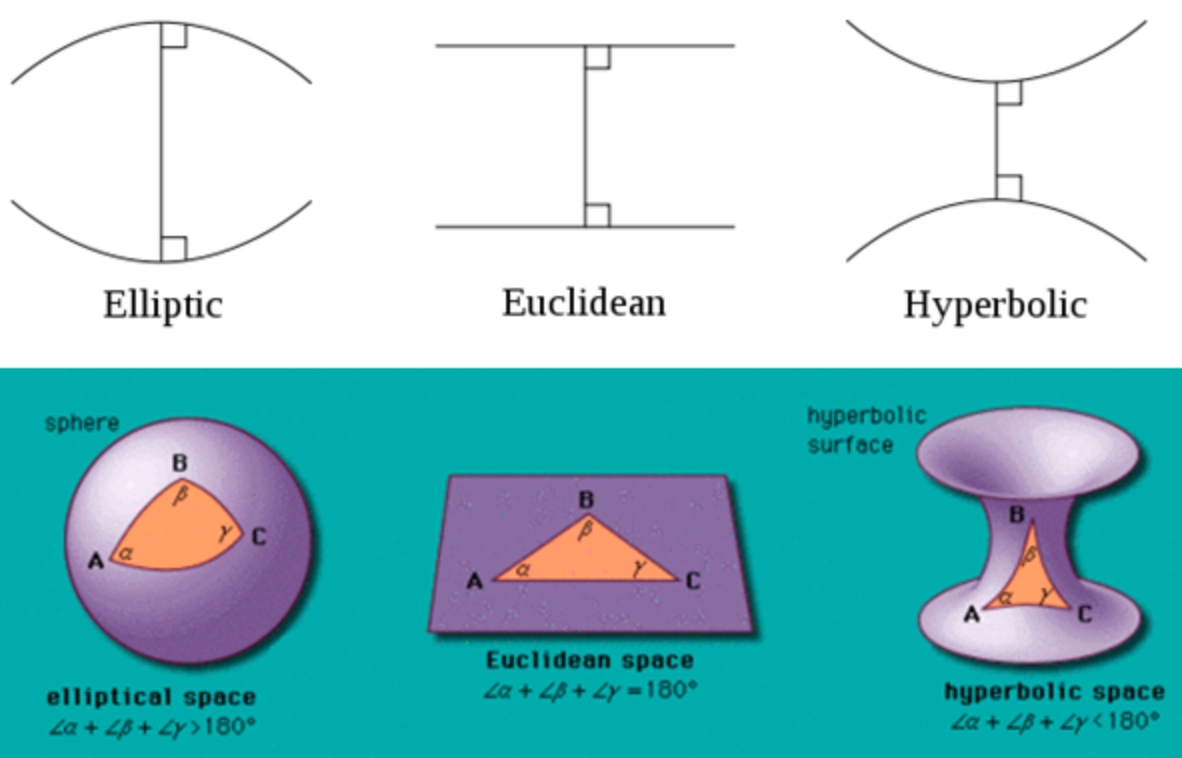
黎曼則另闢蹊徑開拓黎曼幾何學。對應(橢圓)球面幾何。球面上所有的“直線”都是 中心在球心的封閉大圓。因此所有的“直線”都相交。平行公理變成一條直線外一點沒有任何平行直線。常見的誤區是球面的緯線是平行線。緯線除了赤道是“直線”,其他的緯線都是球面上的“曲線”,不能視為平行直線!
下圖很好的總結三種幾何學。
曲面幾何和曲率
非歐幾何的關鍵差異是曲率。曲面幾何可以定義沒一點的曲率。曲率乍看之下是把一個曲面放在更高維空間外視 (extrinsic) 的性質。
例如上圖是把二維的曲面放在(嵌入)三維的歐氏空間,可以明顯看出不同的曲面。同時可以定量的描述這個曲面的曲率。例如球面的曲率非常直觀和球的半徑相反。越小的球,曲率越大。但球面曲率是一個整體的性質,還是每一點(和其鄰近點)的性質?曲率是和半徑成反比,還是和半徑平方成反比?
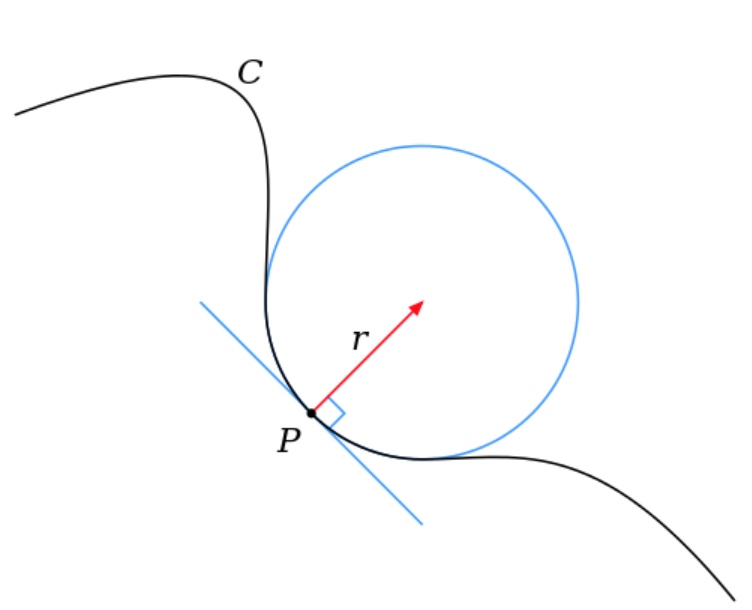
先回顧二維歐氏平面上的一維曲線。很明顯曲線上每一點(和其鄰近點)都可以定義“線曲率” $\kappa$ 是相切圓(不是拋物線!)半徑的倒數,i.e. $\kappa = 1/r$. 當然可以根據相切圓是在曲線的上方或是下方定義 $\kappa$ 是正或是負。$\kappa$ 明顯和泰勒展開的二階導數成正比1。直線的二階導數為 0, 曲率為 0.
再回到二維曲面,曲面上每一點都有無限條曲面上的曲線相交於這一點。每一條曲線都有本身的“線曲率”,可以是正或負。高斯曲率定義二維曲面每一點的“曲面曲率” $R$ 是相交該點所有曲線(更正確應該是 geodesics)最大的線曲率乘最小的線曲率(含正負號), i.e. $R = \kappa_1 \kappa_2$; $\kappa_1$ 是最大線曲率;$\kappa_2$ 是最小線曲率。
以完美球面為例,每一點所有相交曲線的線曲率都一樣。都是大圓(圓心即是球心)半徑的倒數。所以球面每一點的高斯曲率 $R = \kappa_1 \kappa_2 = 1/r^2$. 這符合直覺。
如果是非完美球面,例如橢圓球面半徑為 $(a, b, c)$, 曲面每一點的高斯曲
率都不同,還是可以找到對應的 $\kappa_1 \,, \kappa_2$. (完美或非完美)球面上同一點 $\kappa_1 \,, \kappa_2$一定同正或同負,所以橢圓幾何每一點的高斯曲率為正!
再考慮雙曲幾何。每一點相交曲線的”線曲率“必定有正有負,$\kappa_1 > 0 \,, \kappa_2 < 0$. 所以雙曲幾何每一點的高斯曲率為負!
外視和内視曲率
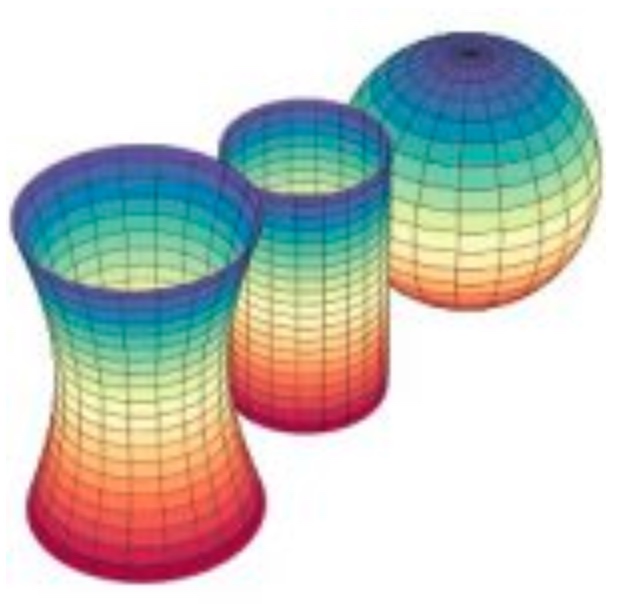
檢查高斯曲率在平面和圓柱面的曲率。平面是 trivial case, 所有 $\kappa=0$. 圓柱面就很有意思,x,y 軸切面是圓形,半徑為 d; z 軸切面是(兩條)直線。帶入高斯曲率,$\kappa_1 = 1/d \,,\, \kappa_2=0$, $R = \kappa_1 \kappa_2 = 0$. 也就是圓柱面每一點的高斯曲率為 0, 和平面一模一樣!
顯然這不直觀。直觀上會認為圓柱面和平面不同,具有曲率,至少在 x,y 方向有曲率。為什麼高斯會定義高斯曲率為 $\kappa_1 \kappa_2$ 而非 $(\kappa_1 + \kappa_2)/2$? (事實上,每一點的平均曲率定義為 mean curvature = $(\kappa_1 + \kappa_2)/2$)。
圓柱面是一個很好的例子,說明外視曲率和内視曲率的不同。
-
外視曲率(extrinsic curvature)就是把曲面放在更高維的歐氏空間,從更高維歐氏空間測量和定義的曲率。
-
内視曲率(intrinsic curvature)就是在(比嵌入歐氏空間低維)曲面本身測量和定義的曲率。更接地氣的說法,就是在曲面上的生物,可以測量和定義的曲率。
-
舉例而言,上圖二維歐氏空間上的一維曲線,對於生活在曲線上一隻只會前進和後退(無限小)的蚯蚓,它能測量每一段曲線的長度,但是否能測量曲線上每一點的(内視)曲率?直觀上顯然不能。唯一的機會是封閉曲線。如果蚯蚓往一個方向前進,最後回到同一點,代表這是一條曲線。假設曲線是圓形,甚至可以算出整條曲線的平均直徑,以及整條線平均曲率。實務上沒有用途:(1)大多數的曲線都是開放而非封閉曲線。(2)即使是封閉曲線,很少是圓形,算出平均半徑,或是平均曲率沒有意義。注意曲率是每一點局部的特性。除非是完美圓形或球形,一條曲線的平均曲率沒有太大意義。上文的 mean curvature 是每一點相交曲線的平均曲率,是有意義。
-
簡單而言,一維曲線的“線曲率” $\kappa$ 是嵌入在二維或是更高維歐氏空間,所以“線曲率”是外視曲率。
-
再看二維曲面,上文由“線曲率”所定義的高斯曲率 $R = \kappa_1\kappa_2$ 或是 mean curvature = $(\kappa_1+\kappa_2)/2$ 應該也是外視曲率。NO!
-
結果很意外。高斯曲率是内視 (bugs-eye-view) 曲率,mean curvature 是外視 (birds-eye-view) 曲率。
-
對於二維曲面上的一隻螞蟻,不用線曲率,它能測量每一點的曲率嗎?能!見下文。具體的方法是在每一點畫一個圓(或三角形),測量圓的面積和 $\pi r^2$ 的差異並正規化,或是測量三角形內角和和 180 的角度差並正規化,就可以得到該點的高斯曲率 $R$。結果剛好等於最大和最小線曲率的乘積 $R = \kappa_1\kappa_2$.
-
高斯自己似乎也覺得不可思議,稱為”絕妙定理“[@wikiTheoremaEgregium2019] 如下。
“Gaussian curvature can be determined entirely by measuring angles, distances and their rates on a surface, without reference to the particular manner in which the surface is embedded in the ambient 3-dimensional Euclidean space. In other words, the Gaussian curvature of a surface does not change if one bends the surface without stretching it. Thus the Gaussian curvature is an intrinsic invariant of a surface.”
-
所以平面和圓柱面的高斯曲率是相同的。一隻曲面上的螞蟻無法分辨局部是一個平面或是圓柱面。因為圓柱面展開是一個平面。但是 mean curvature 兩者不同。因為 mean curvature 是外視曲率。
-
兩個曲面如果每一點高斯曲率相同,則為 isometric. 反之,無法 global isometric, 最多是 local isometric. 球面和平面無法等距 mapping. 只要看地圖就知道。赤道部分比例可以很準,但是兩極比例差很大。
-
三維空間如何定義“内視“曲率?因為很難直觀想像三維彎曲空間嵌入一個四維空間。三維彎曲空間包含三個 basis (x, y, z), 每一點(和鄰近點形成的空間)可以分解成 xy, yz, xz 三組曲面,各自有高斯曲率。所以曲率是一個三維張量。Feymann lecture said there are 6 values to fully describe curvature.
-
圓周率不是很好的曲面特徵,因為不是定值。Use N-dimension unit volume instead. S(r) = dV(r)/dr or dV(r) = S(r) dr (Gray and Vanhecke 1979).
-
更重要的特徵是平行移動 (parallel transport) 以及沿著 close loop 的 parallel transport 的角度差,稱爲 holonomy. 平面幾何對於任何 close loop 的 H=0. 黎曼幾何 H > 0. 羅氏幾何 H < 0. Holonomy 是局部和全域連結的關鍵。
曲面幾何的其他特徵
除了平行公理可以用來分類不同的曲面,是否有其他更直觀的特徵分類? Yes! 可以用三角形內角和是否大於,等於,或小於 $180^o \,(or \,\pi)$ 如下圖。
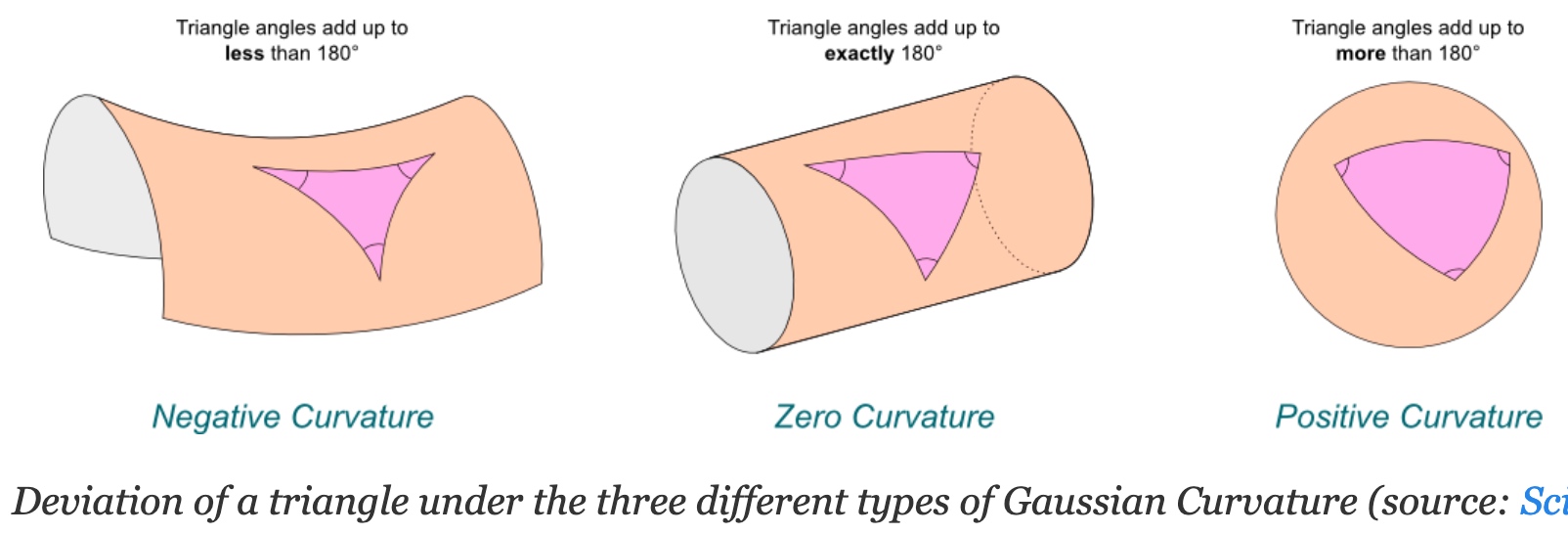
另外一個特徵是圓周率。在平面幾何任意圓的周長除以直徑永遠等於$\pi$.
但在曲面則會小於或大於$\pi$.
以上特徵(三角形內角和,圓周率)不只是定性的描述,都和高斯曲率有定量的關係。更重要的是這是曲面内視的特性!就是在曲面的生物,就可以測量到高斯曲率。
下表總結三種幾何學:
| Creator | 黎曼幾何 | 歐氏幾何 | 羅氏幾何 |
|---|---|---|---|
| (Global) 曲面形狀 | 橢圓 | 平面/柱面 | 雙曲面 |
| (Global) 高中平行公理:直綫外一點有幾條直綫不相交 | 0 | 1 | $\ge 2$ |
| (Global) 三角內角和 | A > 180 | A = 180 | A < 180 |
| (Global) 圓周率 | $<\pi$ | $\pi$ | $>\pi$ |
| (Global/local) Holonomy: PT 沿著 close loop 的角度差 | H > 0 | H = 0 | H < 0 |
| (Global/local) Independence of PT (!PT): PT 在任兩點相同和軌跡無關 | No | Yes | No |
| (Local) 高斯曲率純量: K | K > 0 | K = 0 | K < 0 |
| (Local) 黎曼曲率張量: $R^a_{bcd}$ | $R \ne 0$ | $R = 0$ | $R \ne 0$ |
| (Local) Ricci 曲率張量: $R_{\mu\nu}$ | $R \ne 0$ | $R = 0$ | $R \ne 0$ |
Q:上表的平行線,三角內角和,圓周率都是 global (全域) 特性。但是高斯曲率卻是 local (局部) 特性。如何連結 global and local?
A:Parallel transport。也就是 !PT 和 H=0
-
圓周率 Bertrand–Diguet–Puiseux theorem (Wifi 2019a). 是否有積分形式? \(K = \lim_{r\to0^+} 3 \frac{2\pi r - C(r)}{\pi r^3} = \lim_{r\to0^+} 12 \frac{\pi r^2 - A(r)}{\pi r^4}\)
-
三角形內角和 (Gauss-Bonnet theorem (Wiki 2019a) \(\sum_{i=1}^3 \theta_i = \pi + \iint K dA \quad\text{or}\quad K = \lim_{A\to0^+}\frac{\sum^3 \theta_i - \pi}{A}\)
-
A good article to integrate everything including Laplacian using unit volume (Gray and Vanhecke 1979).
- 一個明顯的問題是平行公理是全域的特性(直線永不相交),是否有直接對應局部公式? Yes,平行移動 parallel transport 就是平行的微分定義!! 和曲面微分幾何有非常深層的連結。
- 反向問題:既然可以用三角內角和以及圓周率極限定義曲率,還需要用平行定義取率嗎? Absolutely Yes, 平行觀念和座標 grid line and local basis vector 定義吻合(local basis vector = grid line 的切線),可以直接融入純量場,向量場,張量場的微分運算。 相反三角內角和或圓周率基於極限的定義在各種微分幾何的運算並不實際。
(Keng 2018) 剛好和我想的一致,平行公理和 parallel transport.
Reference
-
$\kappa = \frac{y’’}{(1+y’^2)^{3/2}}$ ↩